
摘要:机械臂轨迹规划是机器人运动规划领域中至关重要的经典研究方向之一。随着机器人时代的到来,机械臂在工业制造中得到了广泛的应用,如何更好的利用机械臂的运动性能,获得运行时间较短或者消耗能量更少的运动轨迹成为人们关注的重点。
关键词:轨迹规划,动为学模型,时间最优,能量最优
引言
在最大化化器人系统的生产效率方面,时间最优运动规划一直是一个很重要的课题。一垄常用的求解最短时间的轨迹规划方法通常只用到机器人的运动学模型,而没有用到机器人的动力学模型,这样的规划结果往往不能充分发挥机器人的潜力。
结合第二章介绍的机械臂动为学模型参数辨识方法,那么可W辨识出机械臂的动力学模型,进而使用更为有效的基于机械臂动力学模型的轨迹规划方法。本章采用了Verscheure[56:i等人提出的基于凸优化求解时间最优轨迹规划方法,并在此基础上添加了表示能量和力矩变化率的代价函数,使得规划轨迹更加易于机械臂的执行。
本章的组织结构如下:3.2节介绍了基本基于力矩约束的时间最优轨迹规划问题;3.3节阐述了如何将基本时间最优问题转化到凸优化控制问题;3.4节对此凸优化控制问题进行拓展,添加额外的目标函数和约束条件;3.5节介绍了此凸优化控制问题的数值解法;3.6节W六自由度机械臂为目标进行轨迹规划,验证此方法的有效性。
3.2基本问题描述
iv自由度机械臂的动为学运动模型可W表示为如式(2.1)所示的关节力矩T(s) "关于各关节角ge巧"的函数。事实上机械臂的轨迹规划问题一般都是建立在己知路径上的,对于关节空间中的路径我们可W用t(s)来表示,其中伪位移S是一维路爸坐标系。这个路径坐标系是由机械臂末端在巧卡尔空间中移动的路径决定的,那么轨迹的时间约束就可表示为坐标轴S和时间t的关系式S(t)为了不失一般性,可レ乂假设轨迹起始于于t=0,结束于t=T并满足s(0)=0<5(t)<1=s(t),除此之外,由于现在考虑的是时间最优轨迹规划及其相关问题,故对于t包含(0,T),可化为S(t)的上的毎一点都符合s(t)>〇,并且在S(t)上的绝大多数点上都符合s(t)>0。同时,对于给定的关节空间中的路径g(s),关节的速度和加速度可W通过链式法则推导得到:
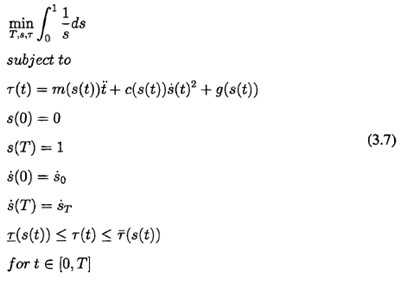
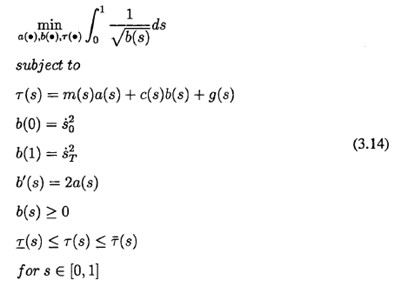
那么基于为矩约東的时间最优轨迹规划可用数学表达式来据述:

基本时间最优问题到巧优化控制问题的变换
对式口.7)这样形式的非线性约束下的目标函数,是无法直接看出所得到的局部最优解是否就是全局最优解。而在ShmerfW这篇文章中,针对时间能量最优运动规划问题将式货7)进行了特殊非线性变换,令其转化为一个受非线性状态控制约束,并包含线性系统动为学模型、状态微分和控制输入的最优控制问题,同时证明了相对于控制输入的汉密尔顿函数是曲函数,进而可レ乂证明拥有这种结构的问题的局部最优解就是全局最优解,因此本文也对式(3.7)的一些变量的进行非线性变换。
首先,通过将原来得积分变量^变换为5,此时目标函数变为

因此式巧.7)描述的问题可1^^被重构为一个凸问题
式(3.14)所描述的问题是田问题是因为所有的约束都是线性的,而目标函数是凸函数。
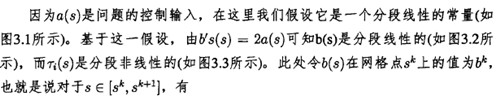
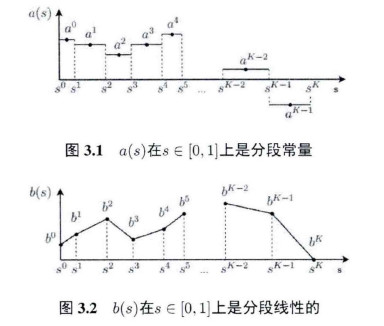
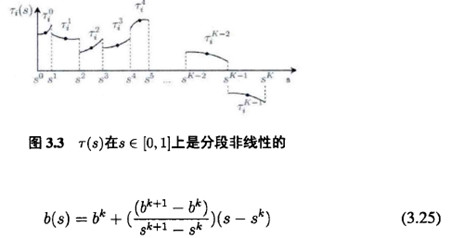
这个问题可W认为是代数微分形式的最优控制问题,它有着伪时间变量5,控制输入a(s),状态微分6(3),代数形式的状态r(s),线性系统的动态特性b'(s)=2a(s)和与线性状态相关的约東条件,W及初始状态和终止状态的约束 条件。
可以看到式(3.14)仅仅只有一个微分状态,而代数形式的状态可通过T(s)=m(s)a(s)+c(s)6(s)+g(s)消除,并且表示时间的变量t不再显式的出现在方程中。这种问题重构形式最大的价值在于:首先其目标函数和约宋都转变为了凸函数,所求得的局部最优解即为全局最优解;其次,可W很容易的添加
目标函数和不等式约束,而不改变整个最优化控制问题的凸性,这将在下面的章节中进行讨论;最后,利用数值方法可W非常有效的对这种表巧形式进行求解。
3.4扩展的西优化控制问题
在3.4.1节中介绍一些实用的约束条件,在3.4.2节中本文提出了额外的目标函数,这些目标函数的增加是为了使得规划出来的轨迹为矩变化较小,更加易于实际机械臂的执行,最后在3.4.3节中将这些目标函数和约宋结合起来,得到一个更加一般但仍能保持凸特性的最优化控制问题。
3.4.1其他不等式约束
除了各关节为矩约束,还有其他一些很有用的约束。
1.速度约束:一些特别的任务中可能要求加入速度限制,此时可W在第i个关节上施加对称的最小速度约束-和最大速度约束亮(5),其具体表达式如下所示:
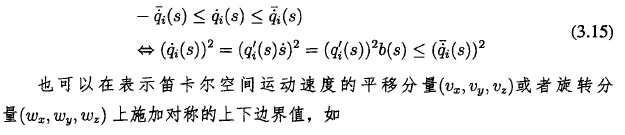
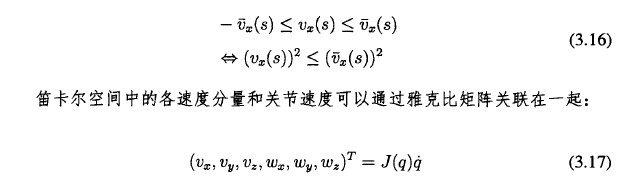
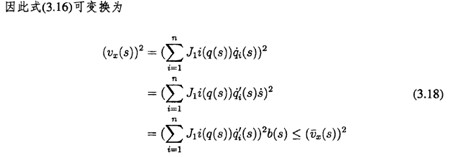
加速度约束和速度约束类似,化可w被应用在笛卡尔空间中的加速度分量上,而不管是作用在关节空间中的加速度约宋还是作用在笛卡尔空间中的加速度约束都可W被写成一个统一的形式:

3.4.2目标函数优化
由于时间最优轨迹通常有着bang-bang特性,并不易于机械臂的执行。所W本文在这个基于凸优化的问题框架中添加一些其它目标函数,从而得到一条更加理想的、考虑其它准则的时间最优运动轨迹。
1.能量消耗:
第关节力矩的平方关于时间的积分可W表示为:

这个目标函数表示的是驱动第i个关节运动所消耗的能量,并且此函数是凸函数。
2.为矩变化率绝对值的积分:

因为N是关于E的巧函数,所W式(3.2巧表示的目标函数也是凸函数。虽然这样的目标函数并没有比较直观的物理解释,但是在最终的目标函数中包含这项可W减小关节为矩的变化率。
3.4.3广义的时间最优问题
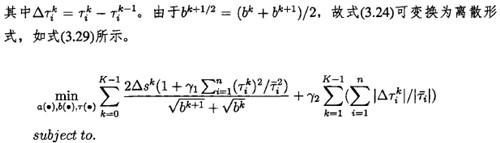
结合式口.7),式(3.22)和式口.23)所表示的目标函数与式(3.7),式口.19)和式口.21)所表示的巧宋项,可W得到一个广义的广义最优控制问题
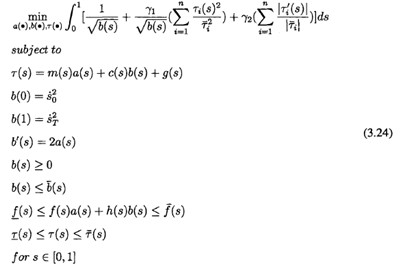
由于这个表适式中的目标函数和不等式约束都是凸的,而等式约束是线性的,所上述广义时间最优问题还是凸的。
3.5数值计算

由于式(3.29)描述的问题为凸,所L乂任何局部最优解也是全局最优的。因此可W任意选取一个非线性求解器来求解这个问题。本文采用的是matl油中的YALMIP王具箱进行求解,这是一种可W求解高级优化问题工具箱,并且有多种求解器可供选择。一旦求解出变量护的值,则可通过束解*(s)得到表示路径坐标轴和时间的关系式S的,而*(s)的表达式如下所示:

3.6实验与分析
本节在ABB六轴工业机器人IRB120上(如困3.4所示)实现基于凸优化的时间最优轨迹规划,3.6.1节介绍了实验任务和目标路径,3.6.2节说明了实验结果。

3.6.1实验任务说明
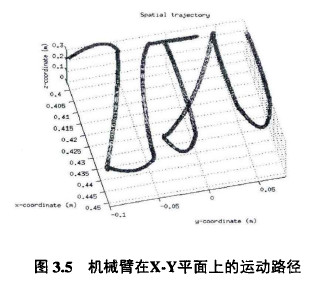
本实验是用IRB120六轴工业机械臂执行复杂的书写任务,书写任务为在水平面上写出"ZJU"字样(如图3.5所示),书写要求是尽可能快的完成这一任务。
为了实现基于动力学模型的最优时间轨迹规划,需要知道IRB120六轴工业机械臂的动为学模型参数,由于本实验室的IRB120机械臂缺芝参数辨识的条件(这在上一章有所介绍),故此处轨迹规划使用的机械臂动力学模型参数是由ABB么司提供的。
3.6.2实验结果
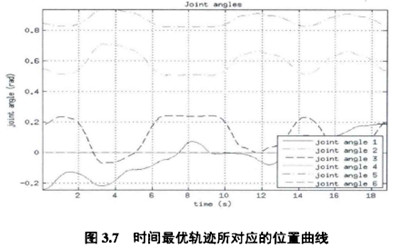
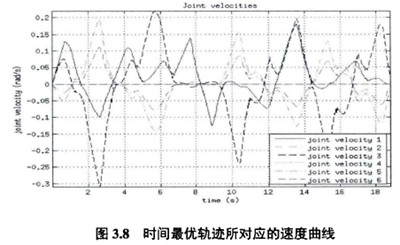
根据3.5小节提出的数值计算方法,可得到完成书写’’ZJU"任务的最短时间为6.4巧。如图3.6所示的是完成这一任务的机械臂六个自由度关节的驱动力矩曲线,可看到在任意一个时刻都有一个关节的驱动为矩是处于满负荷运行的,由于第一关节总是承受这绝大部分的重力作用,所W其很多时间都是处于最大力矩控制状态是可W理解的。图3.8表示的是时间最优轨迹规划对应的位置和速度曲线,由速度曲线可レ乂看出规划轨迹速度在很多地方都有尖角,这也符合控制为矩的突变。
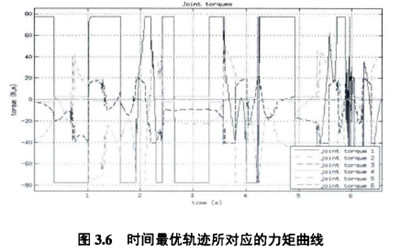
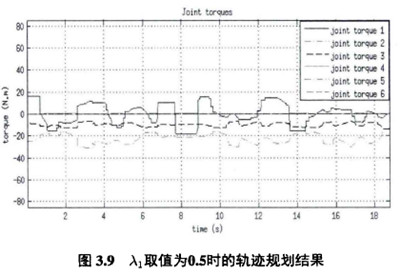
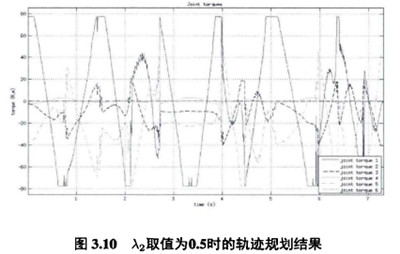
可见单纯的时间最优轨迹规划力矩变化十分剧烈,这种轨迹的执行会造成机械臂很大的负担,并且在实际的机械臂上也是很难实现的,本章在凸优化框架基础上加入的代表能量消耗的目标函数和代表为矩变化率的目标函数就是为了解决这一问题。图3.9表示的是考虑运动时间和能量消耗时的轨迹规划结果,可W看到运动的时间增大到18.3s而运动过程中各关节最大输出为矩显著减小,同时根据式(3.24)可W通过增大Ai的取值使得规划出的轨迹的能量消耗变小。图3.10表示的是考虑运动时间和为矩变化率的轨迹规划结果,可W看到运动的时间增大到7.2s而各关节力矩变化率降低了,同时根据式(3.24)可W通过增大乂2的取值使得规划出的轨迹的力矩变化率进一步减小。
由于六自由度机械臂IRB120并没有提供力矩输入的接口,本次实验规划出来的轨迹没有在实际机械臂上运行,然而轨迹规划的运动轨迹符合机械臂动为学横型等一系列约束条件,故可认为规划结果在实际机械臂上化是可行的。
3、 本章小结
本章介绍了用凸优化方法求解时间最优轨迹规划问题,拓展了优化的目标函数,考虑能量消耗和各关节为矩的变化率,使得得到的轨迹更加平滑,易于机械臂的实现。最后针对六自由度机械臂IRB120进行了最优轨迹的规划,验证了算法的有效性。
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com








