



一种智能化定位测量系统
2017-8-3 来源:中国飞行试验研究院 作者:何红丽
摘要:根据试验测试需求,设计一种集点、线、面为一体智能化高精度三维坐标定位测量系统。该系统主要应用于飞机结构性能检测以及工业现场标定中,具备测量仿真、在线校准、在线测量、快速处理、实时监控的功能,给出系统构建思路、框架、组成,并对关键技术问题进行剖析;在实验室利用全站仪、影像测量设备等搭建一个综合测试平台,验证了设备接口信息互操作性、实时引导、坐标转换、平差处理等关键功能,其功能、性能均满足测试需求。系统的建成将有力助推飞行试验智能化测试技术的发展,对提高测试精度、速度,节省人力、物力都具有非常重要的作用。
关键词:三维模型;智能测量;系统设计;测量仿真
0.引言
飞行试验空间定位测量是在真实试验环境下,对航空飞行器及附件等位置参数进行测量[1],其主要应用于飞机结构性能检测以及工业现场标定中。近几年来随着数字化测量技术进入制造领域,其在测量、检测、装配、校准等领域发挥的作用越来越重要,尤其是对于尺寸大、产品结构复杂、制造工艺要求高、生产速度要求快的各类型航空武器系统。在航空武器系统的测量中,既要测量飞机、武器本身的位姿信息,还要测量飞机与武器之间的相互关系;测量精度要求高,测量任务多,测量频度高,每年测量上百架次;测量由原来的静态转换为动静结合;且随着科学技术的发展,测试向着数字化、综合化、集成化、标准化、在线化等智能化方向快速发展[2]。
要快速实现上述测量需求,智能化测试系统的研制是必然选择。没有有效的测量手段就不可能实现在线自动化检测,只有通过智能化测试系统的构建,才可提高试飞测试精度、速度,节省人力、物力。本文主要针对空间定位测量需求,跟踪国内外智能化测试技术发展趋势,设计满足未来武器发展需求的高精度空间三维点、线、面一体化智能测量系统。该系统需具备仿真计算、在线校准、在线测量、快速处理、实时监控的功能,可实现飞机模型构建,武器系统在飞机上的安装过程在线检测、复杂体的定位及试验现场监控,为现场测试、决策提供依据。
1.系统架构设计
1.1 基本框架
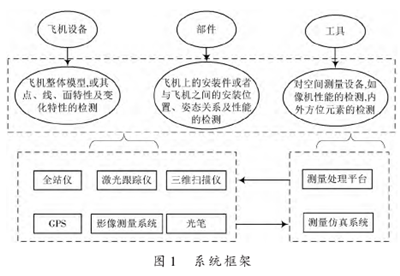
依据飞行试验所需,采用先进的数字化测量设备如全站仪、光学坐标测量仪、三维扫描仪、激光跟踪仪等多测量设备联合作业,以期解决飞机结构性能检测和工业现场标定问题。构建思路是基于三维模型,通过计算机、自动控制等技术,实现对被测对象的一体化测量[3];通过离线编程进行设备的布局与任务规划,系统建成后可在线检测、在现场进行数据处理,缩短处理周期,提高测量数据的有效性和准确性。在测量平台构建过程中充分考虑系统的先进性,系统构建既要具有数据处理、操控功能,同时要能够对测量设备布局进行优化,对测量任务轨迹线路进行规划,在确保精度的情况下完成自动化测量。系统框架如图 1 所示。
1.2 系统组成
针对飞行试验机库特点,构建智能化高精度定位测量系统,实现特征点、线、面数据的快速自动化采集、记录、计算、结果报表生成等功能。智能测量系统主要由5 个分系统组成:精确点测量分系统、影像测量分系统、三维建模分系统、测控中心分系统、测量仿真分系统。其中精确点测量分系统、三维建模分系统、影像测量分系统实现信息的采集与获取;测控中心分系统是整个系统的核心,负责数据处理、操控、引导、分析、显示等功能;测量仿真分系统主要完成测量设备的布局、组合以及测量路径的规划,是进行系统优化配置的关键,同时也是自动化测量的基础。具体组成如下:
(1)精确点测量分系统。由全站仪、光学坐标测量仪、激光跟踪仪等设备组成,主要实现对被测对象特征点测量。
(2)影像测量分系统。由摄像机、镜头、解析软件等组成,利用近景摄影原理对目标关键点进行测量,可以给出静态或动态测量过程目标点的测量结果。
(3)三维建模分系统。包含三维扫描仪,模型构建工具等,主要用于模型构建或者是目标的测量及姿态求取。
(4)测控中心分系统。主要实现对系统中的相机、三维激光扫描仪以及全站仪等设备的后台操作控制和信息实时采集、引导发送、处理、评估、显示等,具备图像处理、数据处理、参数解析以及平差计算等功能。
(5)测量仿真分系统。根据测量任务的要求及现场环境知识建立仿真模型,对测量特性进行仿真计算,通过仿真给出某个特定任务中参与测量的测量设备的组合、布局、测量任务的规划,是系统优化配置的关键。主要用于任务的准备,模拟测量现场,对设备布局,设备干涉、测量轨迹路径的模拟,对测量方案及计划进行确认。
1.3 软件规划
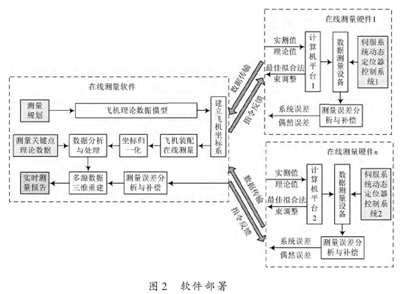
对于一项测试,要进行智能化测量,任务部署规划很重要。首先通过测量仿真,获取测量规划,然后再依据规划进行在线化测量及结果报表的生成。软件功能的部署如图 2 所示。
2.关键技术
2.1 联合靶标的合理设计、布置和测量
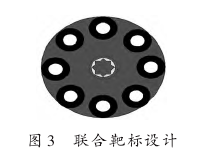
一个由多测量设备构成的综合测量系统要获取高精度的测量结果,首先要根据观测对象条件来确定联合靶标设计及布局,以确保测量体系的统一。在这一过程中,需要充分考虑多种测量设备对测量标志的识别特点,考虑测量对象的尺寸规模、标志点的结构特点。为此进行了联合靶标的设计,让所有测量设备信息可以划归在统一测量体系。设计的联合靶标如图 3 所示,由反射棱镜和圆形回光反射标志点构成,其中反射棱镜可以由激光跟踪仪或全站仪识别,而圆形回光反射标志点可以由影像测量设备、三维扫描仪识别,然后通过解析算法,依据反射棱镜的中心把所有的测量点划归在同一个参考中心。要提高测量精度,在布局过程中要获取多样性的观测数据。多样性的观测数据是其平差模型准确的基础。在布控时考虑测量过程中的盲区分布、光学单元可利用的空间分布、光学测量系统的光源布置等。
2.2 基于模型的智能化测量流程设计
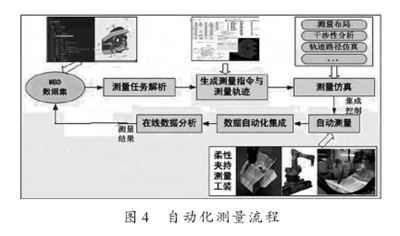
智能化测量流程设计是基于数字化三维仿真模型[4 5]。首先对测量任务需求进行解析。根据相关测试要求进行测量指令的生成,依据现场环境,通过测量仿真进行测量设备的选取、组合与布局。根据仿真生成的测量规划进行集成控制及自动化测量,在测控中心完成所有测量数据的采集和计算,构建统一的坐标体系、数据解算,完成在线测量与分析,最终给出测量结果。自动化测量流程如图 4 所示。
2.3 测量仿真
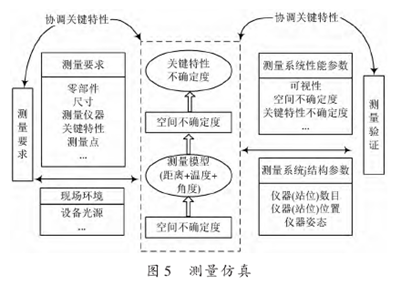
测量仿真是实现智能测量的首要条件,在复杂试验现场环境下,建立合理的测量场模型是测量规划与系统优化配置的基础和关键[6?7]。总体上,测量场模型要根据测量任务的要求及现场环境模型而建立,其中应包括工作空间、零部件、障碍物、测量目标、测量仪器、测量空间内的环境因素等信息。对测量系统按照不同布局或配置方案组合,通过仿真将形成不同的测量场结果,由此可以在现场实际测量实施之前评价测量系统的性能参数并得到优化的结构参数,验证测量场模型和试验需求相符性,在仿真过程中着重关注可视性与精度特性。测量仿真过程如图 5 所示。
2.4 自动化测量过程
自动测量用到的设备有跟踪设备(跟踪仪,全站仪),采用“坐标值转换设备自动驱动自动找点数据采集”的方式实现自动瞄准测量[8]。首先基于三维数/模获取各测量点在设计坐标系下的理论位置,计算设计坐标系与测量坐标系的转换关系,获得当前实际状态下各个测点在测量坐标系下的理论坐标值,通过程序控制测量设备自动定位到要采集的测量点附近,使跟踪仪自动精确搜寻到靶球靶心,完成测量,然后进入下一个所需点的搜索并测量。
3.验证
利用全站仪、影像测量系统等组建了一个综合测量平台,通过该系统验证了实时引导、坐标转 换 、平 差 处 理 等 关 键 功 能 。 利 用 开 发 的 软件可稳定操控设备进行测量、融合精度优于单独设备精度;测量范围得到拓展。同时在多个型号测试验证了多测量设备组合自动化测量模式,实现了在线测量,提高工作效率与测量的可靠性。
4.结语
采用多测量设备可以构建大尺寸智能化定位测量系统,该系统建成之后,可以实现常规任务在线快速测量。智能化测量是一个系统工程,要达到智能化测试目标,需要统筹规划、补点建线构面、逐步实施。中国飞行试验研究院按照此思路正在开展智能化测试工作的逐步推进,系统的建成将有力助推飞行试验智能化测试技术的发展,对提高测试精度和测量速度,节省人力、物力都具有非常重要的作用。
投稿箱:
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com
更多相关信息

