


引言:为在机床上进一步提高定位精度、提高加工面和加工形状精度、缩短加工时间,需要进行伺服调整。而FANUC的高速高精度加工也是相对而言的,没有绝对的高速高精度。如果要提高精度(跟踪误差小),在拐角或圆弧转角处必须减速,这样就不能达到高速的要求,但提高了速度,必然精度会降低(跟踪误差大)。所以如果要两方面都要提高,必须使用特殊功能。FANUC为αi系列伺服电机提供了更加高速、高精度的HRV3控制方式。下面就HRV3控制原理和调试步骤简单介绍:
为通过伺服调整提高伺服控制的性能,需要理解伺服调整的步骤,并且按照调整步骤分阶段地进行调整。伺服控制采用下面的框图所示的结构。

最靠近电机的伺服HRV电流控制担负着按照高速速度控制输出的指令运转电机的作用,伺服HRV电流控制的性能支持高速速度控制的性能。此外,高速速度控制按照位置控制输出的速度指令对电机速度进行控制,要提高对作为最终目标的位置指令进行跟踪,需要提高位置增益设定,为此,需要提高高速速度控制的性能,而要提高该性能,则需要提高伺服HRV电流控制的性能。也就是说,在为提高伺服控制性能的伺服调整中,改善构成伺服控制基础的伺服HRV电流控制是首先应该解决的项目,然后再解决高速速度控制和位置控制。
通过进行伺服HRV控制,即可提高电流环的响应,从而实现速度环和位置环的高增益化。高增益化不仅可提高指令追踪性能,提高控制外力干扰的性能,而且还有简化象限突起补偿等伺服功能调整的效果,可以使伺服调整更加简单。
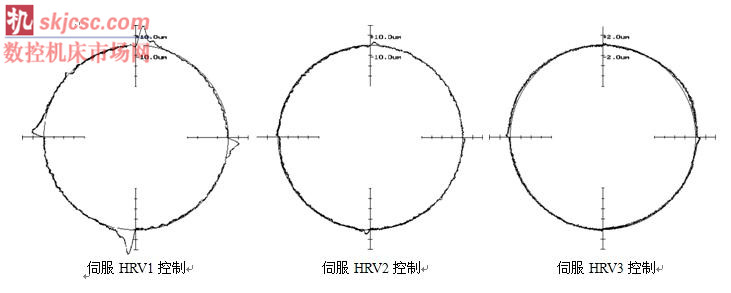
下图示出各伺服HRV控制的增益调整结果。提高基于伺服HRV控制的电流环路的响应,有利于提高速度控制和位置控制响应,从而在不使用反向间隙加速功能下也能够减缓象限突起。
在使用伺服HRV3控制之前需先进行伺服HRV2控制设定,如下表所示参数。
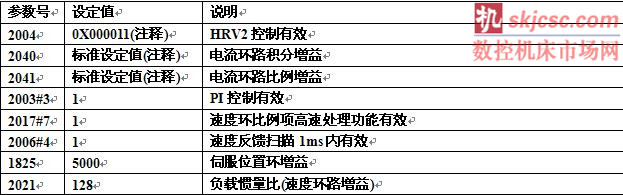
注释:通过设定伺服HRV2控制用电机型号就可自动加载最佳参数。没有相应伺服HRV2控制用电机型号时,可在加载原标准参数后,修改以下参数:
No.2004=0X000011(X不要改动),
No.2040=原标准参数×0.8,
No.2041=原标准参数×1.6,
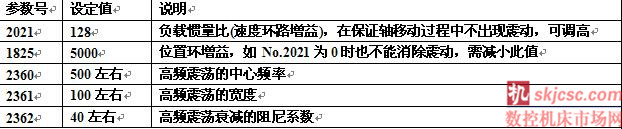
加载完伺服HRV2用标准参数后,设定以下参数,从而得到伺服HRV3控制方式

这样就可实现速度环和位置环的高增益化,既可把位置环增益(No.1825)设定在5000左右,速度增益(负载惯量比)(参数No.2021)设定在300~128之间。
设定以上参数之后,机床可以得到良好的轮廓控制,尤其是圆弧加工,效果比较明显,可以很好的应用到立式加工中心上。但是由于机床机械自身的特性不同,以下参数还需调整:
伺服初级优化以广泛应用在我厂HTC系列数控车床上,并得到了验证。以下是HTC3250数控车床在伺服优化前和伺服优化后一些数据对照表:

但是,由于数控系统对机械性能的校正和补偿是有限度的,所以要得到高速高精度的加工控制,首要条件还是要保证有良好的机械特性,才能够更好的发挥伺服优化的性能。(文自:沈阳第一机床厂标准型产品管理部技术室)
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com

