



VLA 原生适配|CT-Unite 机器人运动控制开发平台:科研与量产一体化解决方案
2026-6-4 来源:- 作者:-
当前机器人行业普遍面临控制精度不足、动力学适配性弱、关节能效偏低、多模态数据难以对齐、开发周期冗长等共性瓶颈。CT‑Unite平台深度对接国际前沿VLA(Vision‑Language‑Action)通用模型架构,从底层硬件、核心算法到上层全域动力学控制形成完整技术闭环,帮助开发者系统性解决行业痛点,加速下一代智能机器人的技术迭代与产品落地。平台应用场景覆盖高校前沿科研、工程教学实训、企业产品预研与规模化量产,真正打通从实验室原型到产业化交付的技术通道。
在算法层面,CT‑Unite提供全链路动力学仿真与控制开发能力,支持开发者开展关节动能损耗分析、结构优化设计、算法适配验证、动力学仿真、散热优化、声子传能仿真及多模态数据对齐等关键技术研究。硬件层与VLA模型原生匹配,确保感知、决策、执行的端到端实时协同。
依托中科半导体开源技术生态,平台原生支持FOC矢量控制、PID高精度伺服闭环等底层算法快速调优;对MPC模型预测控制提供高效解算能力,可精准适配关节极限、接触力阈值、速度/加速度约束等复杂物理边界,实现高精度、高稳定性的动态伺服控制。
平台支持分布式多设备组网,可串接构建实时控制网络,完整复刻WBC全身控制逻辑。它能将高维、强耦合的全身多任务控制标准化为二次规划(QP)求解,支持自定义任务优先级,智能消解姿态、行走、末端执行等多任务冲突,在物理约束下实现全身协同、动态稳定、高精度仿真验证与算法落地,全面覆盖ZMP、MPC、WBC等高端机器人主流算法开发场景。
在硬件层面,平台基于CT‑2001A控制芯片+CT‑190X系列GaN驱动芯片打造,具备开关频率高、导通电阻小、体积紧凑等核心优势,为机器人动力系统带来显著性能跃升。开发者可通过平台精准模拟寄生电感、电压过冲、开关损耗等工程问题,获取真实测试数据,指导小型化、高能效关节电路板设计,有效降低环路热阻、减少关节发热、提升能量效率,同时大幅缩短产品开发周期,加速从原型到量产的转化。
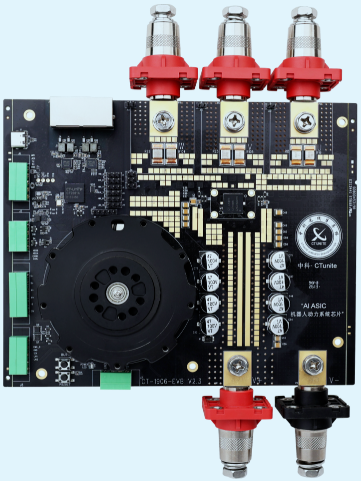
CT‑Unite平台通过芯片级实时性优化,将VLA模型控制能力以简易、稳定、可落地的方式交付开发者。结合中科半导体开源运动控制模型生态,开发者可直接体验AI ASIC芯片赋能下一代机器人开发的技术优势,高效突破运动控制与关节执行器性能瓶颈,快速将创新想法转化为可验证、可量产的技术成果。
为推动技术创新与人才培养融合,中科半导体面向高校科研团队、教师、学生及产业伙伴正式启动产学研协同计划,诚邀参与技术攻关、难题揭榜与联合创新。平台设立多梯度现金奖励机制,重点激励FOC、MPC、ZMP、WBC、ToF、DVS、机器视觉、动力学算法、多模态融合神经网络等方向的技术突破,助力在校师生深度参与企业级研发流程,同步真实产业场景,缩短校园学习与产业需求的距离,培养机器人运动控制算法领域紧缺的前沿技术人才。
如需获取合作信息与技术资料,请联系:邮箱:sales1@ctunite.com(注明“机器人运动控制开发平台”)。
投稿箱:
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com
更多相关信息

