



船用柴油机电控系统关键技术
2015-9-6 来源:数控机床市场网 作者:樊明龙 沈玉华
摘要: 针对船用柴油机电控系统对柴油机的调速问题,根据国内外非线性自调整算法的研究以及船用柴油机调速器的设计原理,在传统 PID 控制的基础上,本文提出非参数模型的自调整控制策略。通过对 D6135 型船用柴油机特点和性能分析,对其进行仿真建模,最后在 Matlab 软件中对柴油机调速控制系统进行仿真,对电控系统的关键技术进行研究。根据仿真结果可以看出本文提出的自整定控制策略具有可行性,为船用柴油机电控系统提供一个有效的控制算法。
关键词: 柴油机;控制;自整定
0 引言
在现代船用柴油机的控制系统中普遍采用电控系统,通过电控系统实现对柴油机转速的稳定控制,使其在工况范围内保证转速波动率、恢复时间、调速率等运行参数在规定的范围中。而通过对船用柴油机的系统运行机理进行分析,可以发现被控对象数学模型复杂,难以精确描述,具有很强的非线性特性和时滞性。并且柴油机在运行过程中还受冷却水温度、燃油温度、负载等外界条件影响,具有很明显的时变特性。传统控制方法已经难以满足对柴油机的控制要求,因此需要利用现代控制算法来解决柴油机的控制问题,使其能够运行在稳定的参数范围内。
1 自整定控制算法
1. 1 系统设计要求
1) 稳定性。稳定性是判断控制系统性能的最基本要求,其具体要求是,在有外界干扰的情况下,能够保持系统的状态能够稳定在一定范围内。
2) 收敛性。收敛性是评估一个自适应用控制系统算法优劣的重要参考标准,主要指一个控制系统在保证能够收敛的条件下,可以完成系统想要达到的不同目标,同时保证变量的范围有界。
3) 鲁棒性。鲁棒性是用来表示一个控制系统对参数扰动的不敏感性。指系统在没有特别的针对动态特性进行建模的情况下,遇到外界扰动时,系统可以保持稳定性和动态性。
1. 2 自整定 PID 算法
在现代控制系统中,一般都采用比较成熟、可靠的数字 PID 控制器,以实现较高的控制精度。PID控制器主要有增量式和位置式 2 种算法。其中位置式 PID 控制算法应用较为广泛,该算法可以根据采样时间差来计算控制量,并且 PID 公式中微分和积分项都需要离散化后才能使用,由于这一特性,导致其在运行时计算机的计算量非常繁重,并且当输出大幅度变化时,输出对应的执行机构也会大幅度的跳变,很容易发生严重的事故,所以不适合实验或开发应用。
增量式 PID 控制算法则很好地克服了位置式 PID控制算法的缺点。增量式 PID 算法只要输出控制量的增量,计算量不大,算法的增量控制表达式如下:

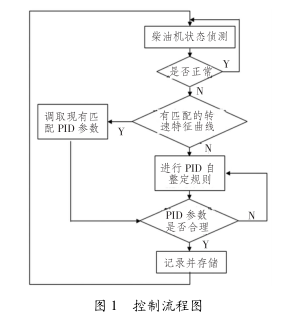
1. 3 在线自整定控制流程
在线自整定控制算法的流程图如图 1 所示。从图中可知,本算法首先对柴油机的转速进行检测,然后再根据所测得的转速在线对 PID 各参数进行判定和整定,在整定完成后,对参数进行记录储存。
1. 3. 1 PID 参数自整定过程
参数的自整定过程,首先是对反馈的转速进行判断,判断是否进入自整定过程,然后对参数进行暂时存储,然后将反馈值与给定值进行比较,然后计算出相应的 Kp和 Ki调节参数,然后实现对方向、幅度等参数的调节。
本算法通过单周期内最小转速与最大转速之间的差值对转速变化的情况来进行判断,然后根据转速变化情况来确定增减 Kp和 Ki,从而达到自整定的目的。在确定调节方向后,还要确定调整幅度,若不能调整到与当前转速相匹配,会导致调整步长过大或过小。过大则突升突降,引起系统不稳定,过小则效果不明显,难以看到转速变化幅度。
本算法通过对前后 2 次幅值的差来确定 Kp的具体调整幅度。根据式(2)和式(3),当差值小于给定的阀值时,则增加调整幅度,当差值小于给定的阀值时,则降低调整幅度。依此对参数进行调整。对Ki调整方式与此类似,主要判断 2 次的差值与阀值的大小,来对调整幅度精细修正。
当系统接近稳定时,可以减小调节,进入微调模式,降低 Kp和 Ki的调整步长,从而实现稳定调节。
1. 3. 2 参数记录
在对 PID 参数经过一次在线调整后,根据专家自整定的相关方法,把此次调整后的结果进行记录方便以后直接调用。在系统以后的调整中,当遇到相同的转速调整要求时,就可以直接调用之前已经调整好的参数,从而降低系统的计算时间和计算量。
1. 3. 3 自整定流程
本算法利用手动调整的经验来对 PID 参数进行调整。首先在进入调整模式后,先把 Ki参数定位为 0,优先调整 Kp,使转速动态稳定,稳定之后调整 Ki, 控制动态误差。在调整 Kp和Ki时,都要遵循先确定调整方向,然后确定调整幅度,在快要接近调整目标后,在对参数进行微调,从而快速调整系统达到稳定。
2 柴油机数学模型的建立
以 D6135 型号的船用柴油机为对象,对电控系统的关键技术展开研究。重要的是需要建立系统模型,由于整个柴油机系统组成复杂,有必要对其工作过程和硬件结构进行简化处理,将系统一些主要的输出状态变量的变化过程表示出来。
2. 1 压气机模型
气压计模型中,增压机转速与流量、出口的压力温度和气压机消耗的转矩均为输入参数,通过查表数据得出下列关系式:

2. 2 中冷器模型
在中冷器模型中,以气压计出来的气体温度、压力质量和流量作为输入参数,以出口气体压力作为输出参数,且工作效率为 ε= 0. 84, 从而得到出口温度的计算公式:
其中 Tω为进口温度;压力损失的计算公式为:
其中: Δp0为中冷器的压力损失; qm0为中冷器的流量。
2. 3 柴油机本体模型
1) 气缸充气效率 ηv的计算公式为:
其中: η0为最大充气效率; n0为充电效率为 η0时对应的转速。
2) 发动机流量 qm3模型气缸内气体流量的公式为:
其中: qmf为单位时间喷入的燃油质量; HLHV为燃油热量指数; QW为冷却物带走的热量; Pc为单位时间内输出的有用功; cpa和 cpe为进气与排气工质的比热容。
4) 柴油机动力学模型
为了计算方便,将船用柴油机动力模型等效为一个由负载和无惯性连轴组成的系统,由牛顿第二定律,可以得到方程:
2. 4 涡轮模型
根据涡轮转速与质量流量之间的关系,可以得到涡轮的膨胀比和效率,然后得到出口温度计算公式和发出转矩计算公式为

2. 5 增压器动力学模型
压气机的增压器转子平衡方程为:

2. 6 执行机构建模
执行器建模的方式一般有 2 种: 一是理论法,根据电磁学和动力学通过数学推导进行建模; 二是试验法,根据实际实验测得的阶跃响应进行建模。在这里采用第 2 种方式。
执行机构的阶跃响应的一阶惯性环节模型的传递函数为:

3 Simulink 建模及仿真
首先对柴油机模型进行仿真参数设定,通过几次试仿真实验,发现0.001 的步长足以覆盖到柴油机运行过程中所有的波动情况。所以仿真步长设定为0.001 s,仿真时间设定为10 s,就可以完整展现整个仿真过程。而在仿真算法中,选择固定步长的 Ode5 算法,此算法与变步长经典算法 Ode45 类似,只需要前面一个时间点的解,就可以将当前点的解计算出来。
首先在不加自整定系统情况下,先对传统 PID参数进行整定,经过调试,设定 Ki= 5,Kd= 0. 5,然后调整 Kp, 其余参数不变,得到转速变化曲线如图 2 所示。
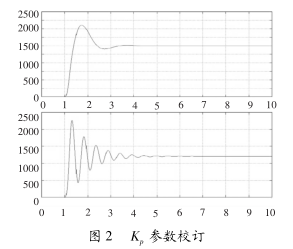
从图2 可看出,由于 Kp从5 增大到10,导致转速变化曲线周期和幅值都出现了明显的变化,速度曲线甚至出现了大幅度的抖动,因此可以确定 Kp的值需要保持在10 以内。在整定 Kp时,让调整步长在 0.01 ~0.04 之间,可以防止速度曲线出现大幅震荡。
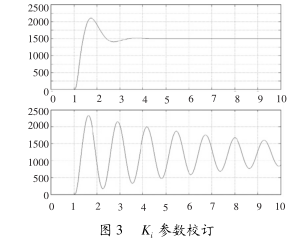
接着整定 Ki, 设定 Kp= 2.5, Kd= 0.5, 速度变化曲线如图3 所示。根据图3,当 Ki参数为15 时,转速的变化曲线几乎一直在振荡,难以稳定下来,且震动幅值变大,在实验操作中需要尽可能避免这种情况发生,所以,在调整Ki步长参数时,每次调整保证在0.1~0.2 之间,从而降低曲线振荡发生的可能。
最后把 PID 自整定模块添加到柴油机的控制系统上,得到速度曲线如图 4 所示。
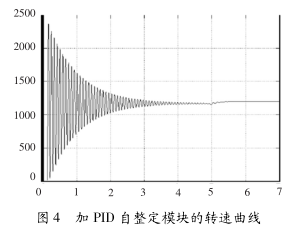
由图4 可看出,柴油机转速曲线在开始时震动明显,但随着时间的推移, Kp和 Ki参数不断自动整定,震动幅度明显降低,最终达到稳定,证明这种在线自整定策略在柴油机控制系统上具有一定可行性。
4 结语
本文在对传统的 PID 控制器的基础上,结合非线性自整定控制器的设计思想,根据船用柴油机调速原理,对非参数模型的在线自整定算法进行初步设计。并以 D6135 型柴油机为模型,根据其特点和性能,进行系统建模,完成了船用柴油机控制系统的仿真实验,由仿真结果可以看出本文提出的自整定控制策略具有一定的可行性,为柴油机电控系统的控制策略提供了一个有效的方法。
投稿箱:
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com
更多相关信息

