



一种简化S型加减速算法的研究
2018-4-3 来源:广东工贸职业技术学院 作者:王彩芳
摘要:基于数控系统的加减速实现理论,研究了一种简化s型加减速速度曲线模型,并针对简化s型加减速模型分析了其加减速过程中的位移、速度、加速度等变化特征。通过对简化s型加减速模型的特性分析,提出在不同起点、终点速度要求下的速度曲线细分方法,并通过仿真验证其可行性。
关键词:数控系统;S型加减速算法;加减速速度曲线
0、引言
加减速算法对数控系统的速度、精度和运动平稳性有着重要的作用,合理选用加减速算法可以减少机床的震动、保证加工质量。随着现代制造业的不断发展,对复杂曲线、曲面的加工要求越来越高,能否进行复杂曲线、曲面的高速度、高精度加工已是衡量数控系统加工性能的重要标志。对于复杂的曲线、曲面,现代的CAM系统都是将其拆分成大量的细小线段再发送给数控系统进行加工的,这样势必会给数控系统带来庞大的计算。因此,如何选择最佳的加减速控制算法,使得数控系统在计算能力范围内能最大限度保证机床的运动速度、精度和平稳性,是数控系统设计的一个关键问题。
数控系统中常用的加减速速度曲线有:梯形加减速速度曲线,指数加减速速度曲线、S型加减速速度曲线,多项式加减速速度曲线,三角函数加减速速度曲线等。不同速度曲线的计算复杂度和运动控制效果均不同,但其表达式都可以用以时间为变量的函数.f (t)来表达。尽管不同的速度曲线.f(t)的具体表达形式有所不同,但.f(t)曲线本身,及其一阶导数、甚至二阶导数是否连续,却是评价各种速度曲线是否能有效地提高机床运动平稳性、实现柔性加工的直接标志。
由于常用的梯形加减速速度曲线和指数加减速速度曲线的一阶导数,也即加速度存在突变,在高速运动时,会对数控机床产生冲击。而三次以上的多项式加减速速度曲线的一阶导数(加速度)和二阶导数(加加速度)均连续,特别是三角函数加减速速度曲线的任意阶次导数都连续,是理想的柔性加工速度曲线的选择,但这两类曲线的计算较为复杂,而且由于完全兼顾运动的平稳性,速度响应较慢,并不满足一些速度响应要求较高的场合。S型加减速速度曲线是一类介于柔性加工的多项式加减速速度曲线与注重速度响应的梯形加减速速度曲线之间的理想速度曲线,具有速度响应快、工作效率高、运动冲击小等特点,可以最大限度满足数控系统速度与精度的控制目标。
1、S型加减速速度曲线分析
一个标准的s型加减速速度曲线模型由加加速、匀加速、减加速、匀速、加减速、匀减速、减减速这七段组成,其结构如图1所示。
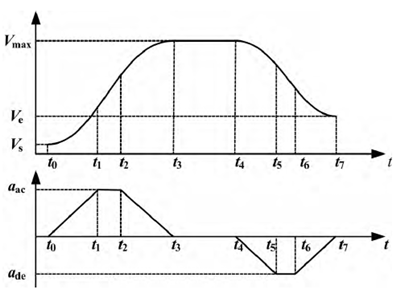
图1 标准S型加减速速度曲线模型图
可以看到,S型速度曲线实际上是一个分段二次多项式函数。采用标准S型加减速速度曲线模型时,由于分段情况较多,计算量较大,在实际计算时,常常采用简化S型加减速速度曲线模型。简化S型加减速速度曲线模型由加加速、减加速、匀速、加减速、减减速这五段组成,其结构如图2所示。简化S型加减速速度曲线具有计算简洁、速度响应快、工作效率高
等优点。
简化S型加减速速度曲线模型各段的加加度、加速度、速度和位移之间的关系式如下。
(1)加加速度
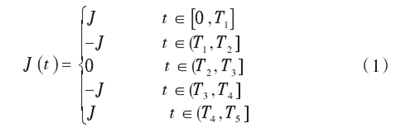
式(1)中,J是S型加减速速度曲线模型的加加速度。
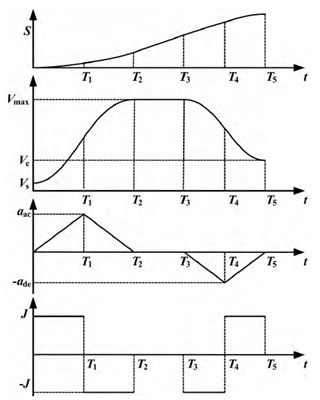
图2 简化S曲线加减速模型
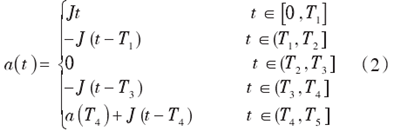
(2)加速度
(3)速度
式(3)中,v是S型加减速速度曲线模型的起点速度。
(4)位移
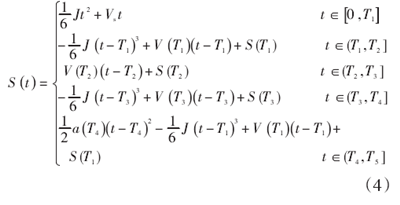
2、简化S型加减速曲线特性分析
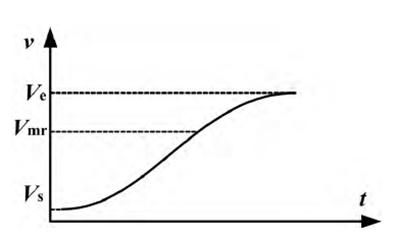
数控系统实际应用中,需要进行速度规划来计算加工速度,因而每段线的起点和终点速度往往并不相等。当采用简化S型加减速速度曲线模型时,根据每段线的长度、起点、终点与最大速度的大小关系,S型加减速速度曲线可细分为如下7种:
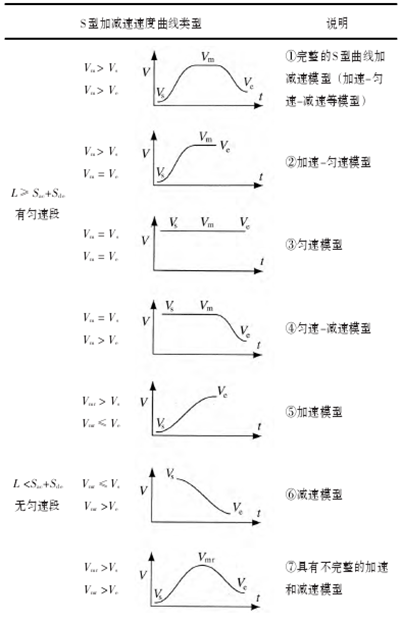
表1 速度曲线类型细分表
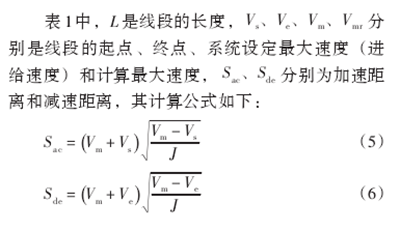
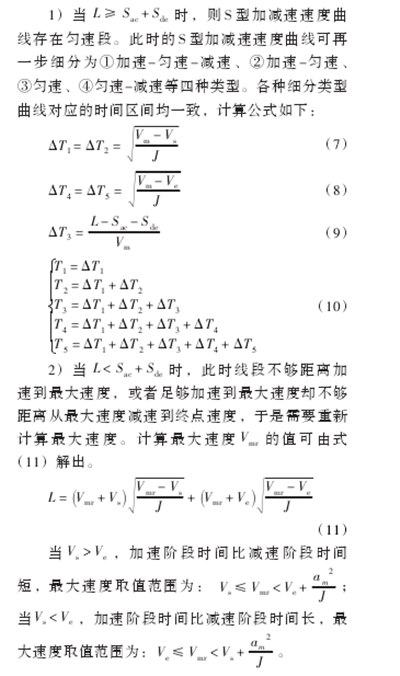
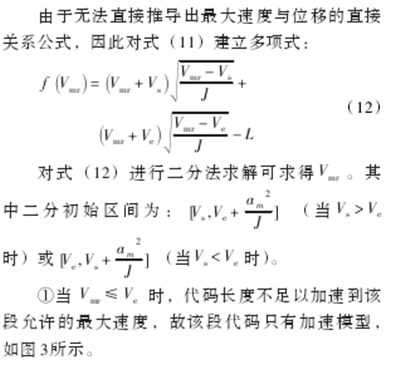
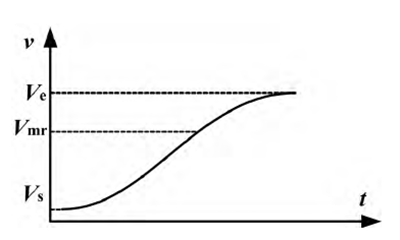
图3 加速段曲线
②当Vm≤Vs时,该段线不存在加速模型只有减速模型,如图4所示。
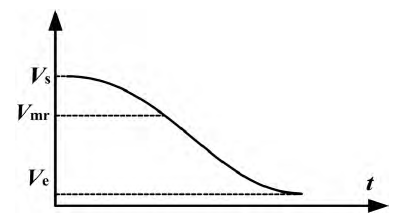
图4 减速段曲线
③当Vm>max{Ve,Vs}时,该段具有不完整的加减速模型,如图5所示。
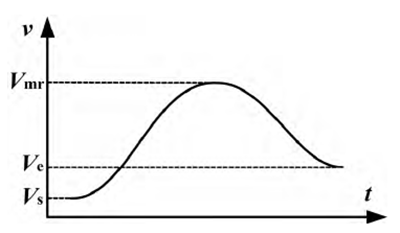
图5 不完整加减速段曲线
3、简化S型加减速算法仿真和分析
下面通过一个简单的二维图形来验证本章的简化S型加减速速度曲线规划算法的可行性。仿真时的系统运动参数(加工参数)设置如表2所示。
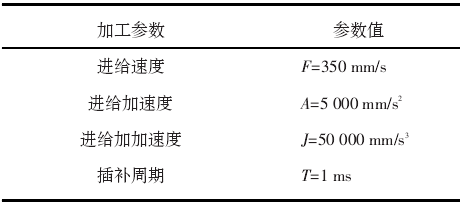
表2 加工参数表
仿真的二维图形如图6所示,是由8段线段构成的封闭轮廓,每段线段的起点、终点坐标值如表3所示。
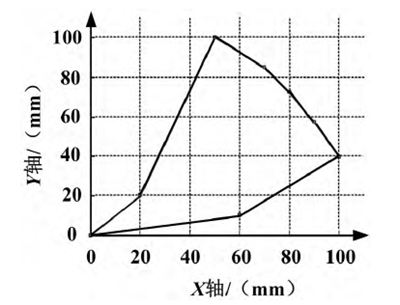
图6 仿真的二维图形
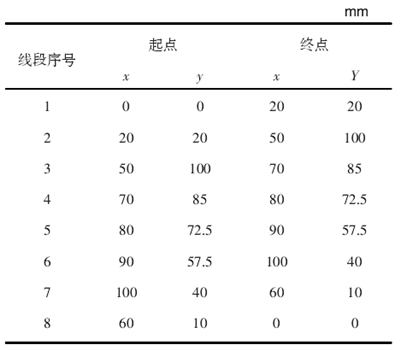
表3 仿真图形各线段的起点、终点坐标值
仿真后产生的速度曲线图如图7所示,整个路径所用的插补时间为1.963 s。由速度曲线图可以看出,仿真图形各个线段的速度曲线包含了完整的简化S型加减速速度曲线和非完整S型加减速速度曲线。各段线段所对应的S型加减速速度曲线类型如表4所示。
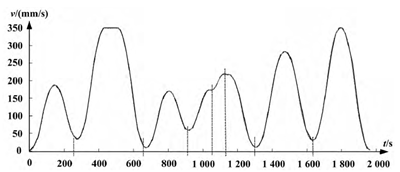
图7 二维图形的速度曲线图
4、结语
本文分析了柔性加减速控制算法的特点,并针对简化S型加减速控制算法的特性展开详细的研究。同时,根据线段的长度和线段的起始、终止速度,给出了不同类型的简化S型加减速速度曲线的快速划分方法和简便的计算公式。
投稿箱:
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com
更多相关信息

