


基于 SOPC 技术和模糊控制理论的数控机床控制系统的设计
2018-5-23 来源: 柳州铁道职业技术学院 作者:覃莉莉
[摘要]本文提出了一种基于 SOPC 技术和模糊控制理论的数控机床 XY 工作台控制系统解决方案,通过Quartus II、Nios II IDE 和 SOPC Builder 等整套开发工具完成了 SOPC 系统的开发。
[关键词]数控机床;控制系统;模糊控制理论;SOPC;Nios II
SOPC(System On a Programmable Chip),是在一块硅片上利用可编程逻辑控制技术集成整个系统的一项技术。SOPC 可以用来进行电子信息处理和嵌入式系统的设计。本文设计的数控机床控制系统中是基于 FPGA嵌入 IP 软核的应用。
一、SOPC 系统的设计
SOPC(System On a Programmable Chip)利用一个芯片就可以完成全部的逻辑处理,其硬件采用 FPGA。这种微处理器系统采用嵌入式的结构设计。
建立在 SOPC 技术基础上的 Nios II 处理器是一种 32 位的 RISC 处理器软内核。可以完成 SOPC 系统开发的整套工具,目前市场上主要有 Nios II IDE、SOPC Builder 以及
Quartus II等。典型的 Nios II 的微控制器包含 Avalon 总线、I/O 控制器、微处理器内核、定时器、存储器控制单元和必要的外围控制部分。
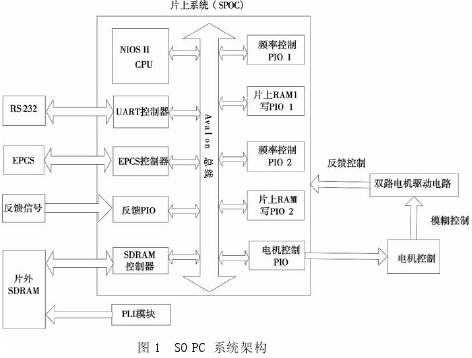
图 1 所示的 SOPC 系统架构是基于数控机床控制系统的要求而设计的.
二、定制 Nios II 微控制器软核
根据数控系统的控制要求,本文对 Nios II 微控制器软核进行了配置。这个配置包括:中央处理器模块、SDRAM控制模块、UART 控制模块、EPCS 控制模块、反馈模块,频率发生控制器、RAM 写入模块以及电机控制模块。其定制过程如下:
(1)构建系统软核在 SOPC Builder 界面中,根据 SOPC 系统架构构建系统软核,设定系统时钟频率为 50MHz。本系统对要求具备高速的响应速度,因此在 NiosⅡ CPU 的三种类型中选择快速型 NiosⅡ/f 的软核类型。JATG 调试模块在系统运行的过程中将占用较多的系统资源,为了确保系统调试能顺利地加入 JATG,减少系统所占用的软硬件资源,需要在完成系统的调试之后,把 debugging level 设置为 No Debugger。
(2)建立 SDRAM 模块SDRAM 诸如刷新 、初始化等逻辑控制由 SDRAM 控制器来实现。物理层面上 FPGA 跟 SDRAM是连接在一起的,SDRAM 控制器的参数设定如下:行地址(
Row address)12 位,列地址(Column address )8位,数据位宽(Data width)16 位。通过 SDRAM 控制器将 SDRAM 用作大容量存储器。
(3)建立 EPCS 控制器:EPCS用于存储 FPGA 配置数据和 Nios II程序代码。
(4)建立 JTAG UART 控制器:JTAG UART 用于Nios II 应用程序的调试。
(5)建立 UART 控制器:RS232的时序议利用异步收发器(UART)控制器来实现。其功能在于提供波特率,且波特率可以根据需要进行调节。访问 UART 模块,在 Nios II
系统中,利用 Avalon 总线可以很容易实现,Avalon 总线允许 Avalon 主外设(例如 Nios II 处理器)通过简单的读和写控制寄存器以及数据寄存器与该 UART 核实现通信。
设置串口通信波特率为 19200,停止位 1 位,数据位8 位,没有奇偶性的检验。
(6)建立系统 ID 外设:生成 Nios II 系统时,会配置唯一的 ID 号,并存入 System ID 寄存器,用以鉴定 NiosII 程序是否与系统匹配。如不匹配,程序将无法下载到
Nios II 系统。
(7)添加 PIO 接口,所添加的 PIO 接口主要包括:RAM写PIO、反馈 PIO、行程开关 PIO、加入电机运行参数 PIO(输出类型)、基准频率控制 PIO、开始控制 PIO。最后生成 Nios II 系统。
三、系统核外逻辑的设计与构建
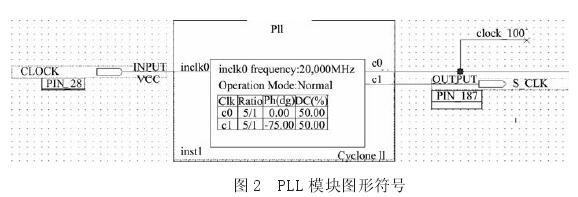
(1)锁相环 PLL 模块的建立锁相环的功能在于解决系统各种设备间的时钟同步问题。它可以实现延时的功能,调节时钟信号。锁相环的设计对于整个系统而言,意义重大。本设计中为 Nois II 软核提供时钟的是 20MHz 的有源晶振,这个晶振外接在 FPGA 上。把有源晶振的倍频设定在 100MHz(c0)。为 SDRAM 提供同样频率时钟的是图 2 中所设计的 PLL 的 c1。其频率的设定跟有源晶振的频率一致,偏移量取-75deg。
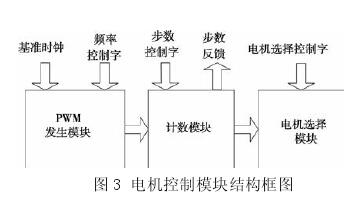
(2)电机控制模块电机控制模块主要由 PWM 发生模块、计数模块和电机选择模块构成,如图 3 为其结构框图。
四、相关硬件电路设计
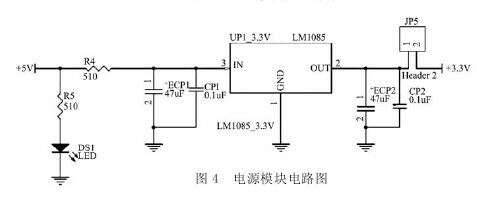
1.电源模块电源模块是保证嵌入式系统工作的前提条件之一,在本系统中,电源模块主要负责给 FPGA 以及后续的电路供电,使用 LM1085_3.3V 来实现从 5V 转到 3.3V,并且在输入端和输出端加滤波电容,保证供电稳定。图 4 为电源模块电路图。
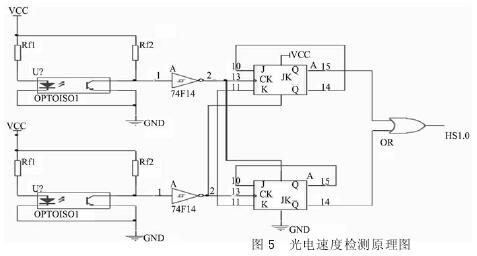
2.速度检测反馈电路
光电编码盘角度检测传感器是一种广泛应用的编码式数字传感器,它将测得的角度位移转换为脉冲形式的数字信号输出。其电路原理图见图 5 所示。
3.电机驱动电路
驱动电路开关管选用绝缘栅型功率管 IGBT。本系统 选 用 美 国 SGS 公 司 生 产 的 专 用 集 成 驱 动 芯 片PBL3717。该芯片构建的电路,不同于传统分离元件组成的电路,避免了工作电路复杂、使用元件多、开启和关断时间长等缺点。PBL3717 栅极驱动器能够在驱动一个高压侧的同时,驱动一个低压侧的功率 MOSFET,能够在一个高性能的封装里实现大部分的功能。
在设计时,只需要添加一路控制电源和少量分立元件即可。PBL3717 芯片即可采用自举自容实现 MOSFET 的驱动。其导通/关断时间为120/94ns,驱动能力为 I0+/-=3A/3A,偏值电压可达500V,开关频率可以从数十赫兹达数百千赫兹,同时PBL3717还具有欠压告警、欠压封锁、过流保护之功能等比较完善的保护功能。所以驱动电路选用 2 片 PBL3717 驱动两个 H 桥。
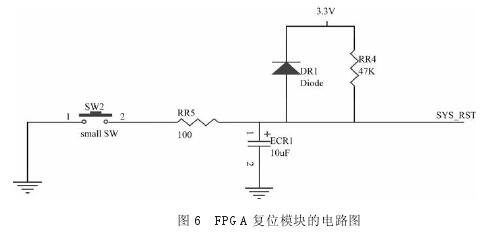
4.系统复位电路
根据数控系统的控制需求,本设计需要把处理器嵌入到 FPGA 内部。而 FPGA 在每次配置的加载都会被复位,这样的复位自动进行。基于这样的情况,需要设计一个系统的复位电路,把 FPGA 内部的状态初始化。
在本设计中,人为地干预系统的运行,必要时,重新输入参数是必需的要求。为实现这样的要求,必须设计一个复位电路,这个复位电路可以通过手动的方式实现控制。按照低电平有效抗干扰能力更强的原则,如图 6 所本文设计了一个常态为高电平(3.3V),通过按键来拉低信号复位电路.
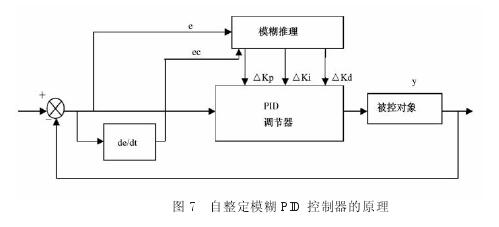
五、自整定模糊 PID 控制器设计
输入误差 e 以及误差的变化 ec,来构建自整定模糊PID 控制器。通过算法,设计模糊控制的规则,修改 PID参数,原理如图 7 所示.
从系统响应速度、稳定与否、稳定精度如何以及超调量等方面来考虑,Kp′,Ki′,Kd′的作用为:
(1)响应速度慢,调节精度低,系统稳态、动态特性差。通常的原因是 Kp值取得过小。增大 Kp的取值可以解决上述问题。
(2)Ki能够消除系统稳态误差。Ki越大,则系统静态误差越快消除。这个参数取得过大,容易产生响应初期积分饱和的现象,从而造成响应过程的较大超调;但取得过小,系统静态误差难以消除,对系统调节精度产生不利的影响。
(3)要想获得良好的系统动态特性,可以取较大的Kd值。但是 Kd过大,会造成调节时间的延长。发生响应过程的提前制动,对于系统额抗干扰性能也会造成不利的影响。
这个参数的作用在于使系统得到较好的动态特性,对响应中偏差变化的任意性进行抑制,还可以对偏差变化的方向进行预报。综合对系统输出产生影响的三大参数参数 Kp、Ki和 Kd,不难归纳出,在不同的 e 和 ec 下,受控参数 Kp、Ki 和 Kd 的自整定要求,得出模糊控制规则的语言描述:
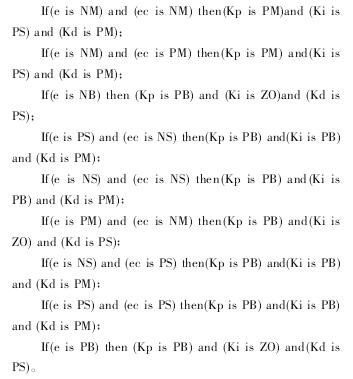
PID 控制器参数 Kp,Ki,Kd 的整定要求因偏差 e 和偏差变化率 ec 的不同而异,分述如下:
(1)当 e 较大时,取较大的 Kp,可以提高系统相应速度;需要注意的是,微分饱和的最直接原因是开偏差 e 在开始的瞬间变大。微分饱和所带来的影响会造成控制作用超出许可的范围。此时,可以选选取较小的 Kd。积分饱和是控制系统所不希望出现的结果,为了避免这种情况的产生,可以取 Ki=0 限制积分的作用。
(2)e 处于中等大小时,Kp 取得小些,容易获得系统响应较小的超调性。这个时候,应该取适当的 Ki 值。此时,对系统影响较大的是 Kd 的取值,为保证系统的响应速度,这个参数取值要适中。
(3)偏差 e 接近设定值,数值较小时,为了获得系统良好的稳定特性,需要增加 Kp 和 Ki 的取值。震荡的产生容易出现在在系统设定值附近。为了减少这个问题带来的不利影响,需要增强系统的抗干扰性能。当 ec 较大时,Kd 应取小些;当 ec 较小时,Kd 可取值大些。
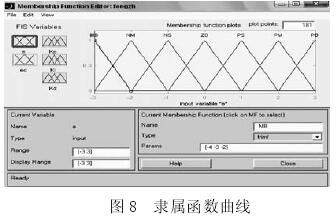
图 8 为隶属度函数曲线。
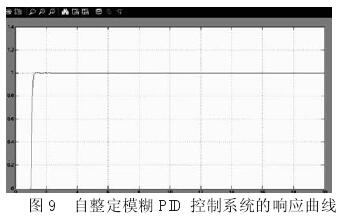
图 9 所示为使用 Matlab 进行仿真所得到的自整定模糊 PID 控制系统响应曲线。仿真的结果表明,采用自整定模糊 PID 控制,系统的稳态性能好,调节精度提高,响应速度快,且没有超振荡和超调。
现代社会经济和技术发展迅速,各种装备都在不断进行升级,因而对于设备的要求也在不断提高,研究数控机床的相关控制技术有着非常重要的意义。基于SOPC 技术和模糊控制理论的数控机床控制系统,开发周期短,成本低廉,是一个值得深入探讨的研究方向。
投稿箱:
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com

