基于动为学的机械臂最优轨迹规划4(给定运动时间的能量最优轨迹规划)
2018-8-7 来源: 浙江大学 控制科 作者: 胡友忠 刘勇 熊蓉
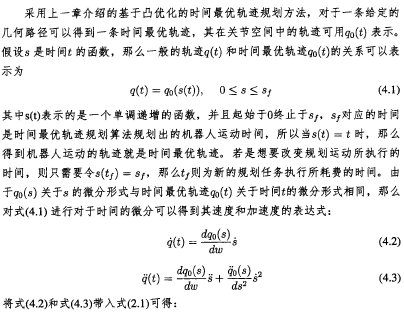
4.1引言
能源危机越来越受到世界的关注,而使用工业机器人的先进生产系统通常会消耗大量的能源,因此如何在工业生产中降低能耗成为科学界研究的重要方向。由于这样的生产系统通常都是全天候运行的,在毎个运动周期中降低很少的能量消耗都能对系统整体的能量消耗产生重大影响。机械臂任务的执行通常是整个生产过程中的一环,因此机械臂执行任务的时间一般也是上层生产调度系统指定的,W此来配合其他生产任务。本文针对这种情况提出了给定运动时间的能量最优轨迹规划方法,来尽量碱少生产过程中的能量消耗。本章组织结构如下:4.2节首先描述了基本的给定时间能量最优轨迹规划问题,为了求解这个问题又构建了一个离散化的状态空间模型:4.3节先简单介绍了动态规划算法,再提出了使用动态规划算法求解这一问题的具体算法伪代码;4.4节在ABB六轴工业机器人IRB120上验证了送一算法的有效性。
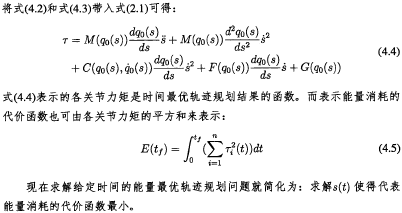
4.2问题摸型建立
现在己经有很多方法用于解决能量最优问题,如动态规划法及后来的迭代动态规划方法、参数化的B样条方法、庞特里至京极大值原理等。通常在使用动态规划方法优化过程中运动时间是不确定的,而本章建立的棋型采用动态规划方法求解可产生给定运动时间的能量最优轨迹规划。采用动态规划方法的好处在于无需考虑问题模型的复杂度,可W在整个网格中搜索最优解。在本章采用的模型中,在考虑时间最优轨迹规划结果的前提下将规划轨迹巧有可能的运动时间都存在于网格中,因此可W使用动态规划方法在较短的时间巧通过一次运算得到给定时间的能量最优轨迹规划结果。
4.2.1基本问题描述
4.2.2建摸
接下来的问题就是如何求解s(t)了。假设知表示的是时间下标为fc的时间常量,而bfc表示的是一个时间下标为&可变的采样时间间隅,因此就存在这样的

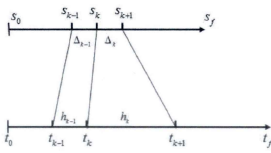
图4.1归一化的巧时间s到时间t上的映射

4.3基于动态规划的给定运动时间能量最优轨迹规划
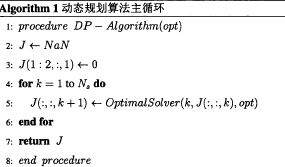
4.3.1节简单介绍了一下动态规划算法,4.3.2节提出了应用动态规划算法求解的能量最优轨迹规划问题的具体算法。
4.3.1动态规划算法概述动态规划算法是一种十分常用的最优化方法,其通过重复求解子问题从而解决复杂的问题。这类复杂问题通常可用一个简单的状态空间模型定义,并由一个或者化个控制信号进行控制。为了解决这类问题,通常将问题分为iV个子问题,并有着iV+1个阶段,通过控制信号使得各个状态在不同阶段之间进行变换。图4.2显示了如何将一个简单问题分为王个子问题四阶段。根据毎个阱段上的状态,控制输入将会动态的变化使得代价函数最大化或者最小化。
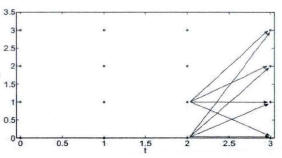
图4.2动态规划算法问题分割简单例子
动态规划算法毎次都是针对一个子问题进行计算的,在解决整个问题的过程中可W是逆序的从最后一个子问题计算到第一个子问题,也可以是顺序的从第一个子问题计算到最后一个子问题,并且用每个阶段的状态计算从当前阶段的状态变换到下一阶段状态所要付出的代价。一般采用顺序形式的动态规划方法求解的最优化问题的表现形式如下所示.
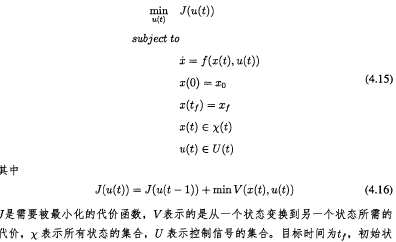
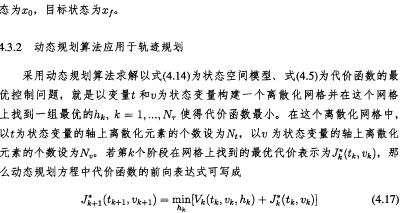
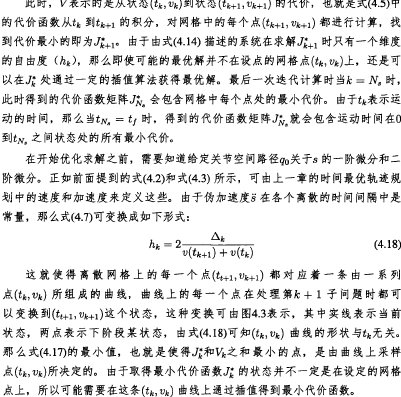
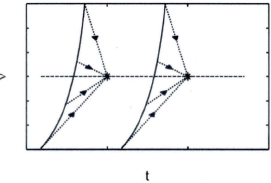
图4.3当前状态与下一阶段某状态么间的对应关系


4.4实验与分析
本节在ABB六轴工业机器人IRB120上实现基于给定时间的能量最优轨迹规划,并利用ABB公司提供的RobotStudio仿真平台做对比试验,验证此算法的有效性。4.4.1介绍了将要使用的Robots山dio仿真台,4.4.2节说明了实验结果。
4.4.1实验平台介绍
RobotStudio是ABB公司推出的一款仿真软件(如图4.4所示),主要用于工业机器人的离线编程。它使得用户可W在仿真环境中定义生产动作或任务,并旦能够准确的对这些任务进行仿真,W至于能够在真实的生产环境中复现仿真结果。
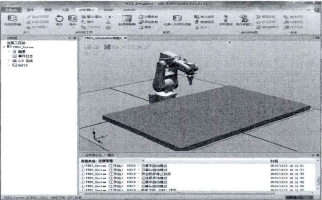
图4.4ABB仿真软件RobotStudio
RobotStudio仿真软件之所从能够实现如此高精度的仿真,归功于ABB的虚拟控制器,这个虚拟控制器和跑在实际机器人上的控制器是相同的。而在仿真环境中控制机器人运动的代码是用RAPID语言编写,这种语言同样也用在实际王业机械臂上。在进行机械臂运动仿真之前,首先需要先定义运动过程。一个简单的运动过程包括一条机器人需要运动的路径。这条路径可由RobotStudio提供的指令来决定,我们只需要给出机械臂末端起始点的位置和朝向,W及目标点机械臂末端的位置和朝向,通过RAPID语言内置指令MoveL可W令机械臂末端在笛卡尔空间中的这两点之间沿着直线运动,同时运动的时间是可指的。Robots化dio也提供了相关指令来获取机械臂运动过程中的当前速度。
4.4.2实验结果
本次实验的路径如下图4.5所示,是一条笛卡尔空间中的倒y字曲线。
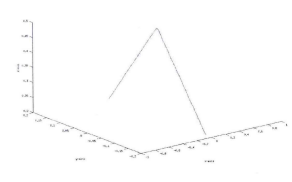
图4.5实验路径
现采用王种轨迹规划方式对于这条给定路径进行轨迹规划,第一种是本论文第王章提出的时间最优轨迹规划方法,其规划出的驱动力矩曲线如图4.6所示;第二种是使用Robots化dio中自带的轨迹规划方式,这也是ABB公司机械臂在实际生产中所使用的规划方式,通过输入运动路径中间点信息,给定的运动时间为1化,就可得到11〇13〇15111出规划出的关机位置曲线和关节速度曲线,通过IRB120工业机械臂的动为学模型就可计算出完成指定运动所需的驱动为矩曲线(如图4.7所示)
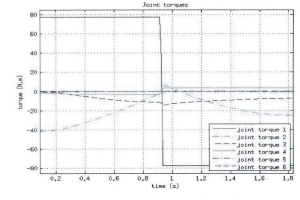
图4.6时间最优轨迹规划驱动力巧曲线
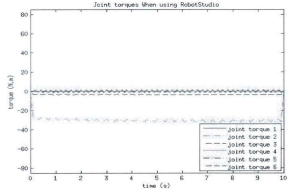
图4.7RobotStudio轨迹规划驱动力矩曲线
图4.7RobotStudio轨迹规划驱动力矩曲线第兰种是本章提化的基于给定时间的能量最优轨迹规划方法,其指定的运动时间也是10s,规划出来的驱动为矩去向如图所示。为了能够比较直观的比较这S种规划方式的耗能情况,在这里画出这王种轨迹规划方法规划结果的耗能曲线(如图4.9所示),此处的能耗指的是各关节驱动为矩的平方在时间轴上的积分。
表4.1表示的是这兰种轨迹规划方式耗能情况在数字上的直观对比,其结果化比较符合预期:时间最优轨迹规划方法耗能最多,RobotStudio默认的轨迹规划方法耗能次之,本章提出的给定时间能量最优轨迹规划方法耗能最少。这也验证了本章提出方法的有效性。
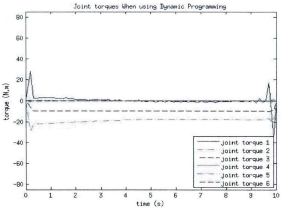
图4.8给定时间能量最优轨迹规划驱动力矩曲线
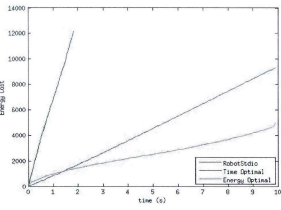
图4.9不同轨迹规划方法的耗能曲线对比
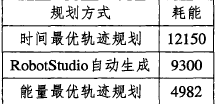
表4.1不同规効方式的耗能对比
4.5本章小结
本章根据己知的时间最优轨迹规划结果,结合动态规划算法,提出了给定时间的能量最优轨迹规划问题进行求解的方法,并给出了具体的算法实现伪代码。最后在六自由度工业机械臂IRB120上进行相应的轨迹规划,遁过与时间最优轨迹规划结果和工业机械臂运动仿真软件RobotStu出0中轨迹规划结果作对比,验证了此算法在给定运动时间的情况下,对于减少能耗的有效性。
投稿箱:
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com
更多本专题新闻
名企推荐







专题点击前十
| 更多