1 单对齿轮的啮合刚度模型
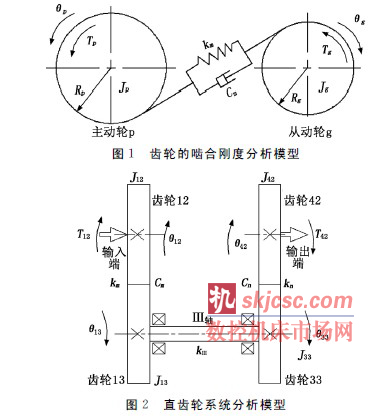
本文主要考虑在输入转速和负载扭矩不变的条件下,输出齿轮转角的变化情况。啮合刚度模型是一个最基本的齿轮副分析模型,只考虑了齿轮副本身的影响因素,忽略了传动轴的弯曲变形、扭转变形和轴承的支撑刚度等。齿轮的啮合刚度分析模型如图1所示。
其中,θp、θg分别为驱动齿轮、从动齿轮的扭转位移;
Rp、Rg分别为驱动齿轮、从动齿轮的基圆半径;Tg、Tp分别为负载转矩和输入转矩;Jp、Jg分别为驱动齿轮、从动齿轮的转动惯量;km为轮齿的啮合综合刚度;cm为轮齿的啮合阻尼。
齿轮啮合刚度模型的建模条件是:驱动轮p匀速转动,负载扭矩Tg为恒定负载。假设在啮合线方向上齿轮的相对位移为x,则x=Rpθp-Rgθg。由于齿轮间的啮合力Fkm=cmx ·+kmx,则Fkm为:

齿轮副的动力学方程为:

2 传动链啮合刚度动力学模型
2.1 直齿轮系统啮合刚度动力学模型[1]
在单对齿轮副啮合刚度分析模型的基础之上,考虑了传动轴的扭转刚度之后就形成了直齿轮子系统的动力学模型,如图2所示。其中,J12、J13、J33、J42分别为各直齿轮的转动惯量;θ12、θ13、θ33、θ42分别为各直齿轮的旋转角;T12为输入端的驱动扭矩;T42为输出端的负载扭矩;cn为齿轮副的啮合阻尼;kn为齿轮副的啮合刚度;kⅢ为Ⅲ轴的扭转刚度。
直齿轮系统分析模型的前提条件是:输入齿轮为匀速旋转运动,输出负载扭矩为恒定负载。结合式(2)和牛顿力学理论,可以得到如下的微分方程组:

其中:R12、R13、R33、R42分别为各直齿轮的基圆半径。
根据Laplace变换对式(3)进行处理,得到关于变量s的多元一次方程组,代入设计数据(数据保密),得出直齿轮子系统动力学模型的转角传递函数G42为:

其中:θ12、θ42分别是θ12、θ42的Laplace变换。
其中:RS、RN分别为太阳轮和行星轮的基圆半径。
(2)内齿圈与行星轮在啮合线方向上的相对位移δRN为:
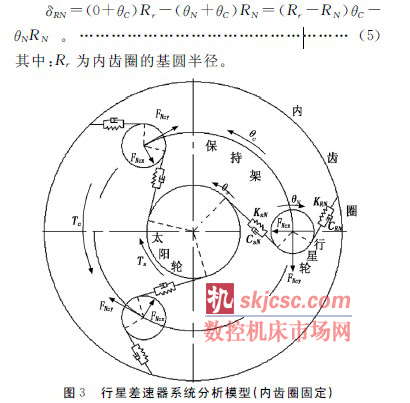
2.2.2 齿轮啮合力的计算
(1)内齿圈与行星轮的啮合力FRN为:

将式(4)~式(8)代入到式(9)、式(10)中,并转化成方程组的形式为:

式(11)中的变量为:TC,θS,θ1,θ2,θ3。由于θ1=θ2=θ3,故用θN来替代,使之满足θN=θ1=θ2=θ3。将
![]()
式(11)进行Laplace变换,代入设计数据(数据保密)求得转角传递函数GCS:
其中:θC、θS分别为θC、θS的Laplace变换形式。
3 传动链动力学总模型
将前面的直齿轮系统和行星差速器系统的动力学模型进行综合,用转角传递函数来表示最终的动力学模型。由于这两个子系统是串联关系,因此总传动链模型的转角传递函数为:

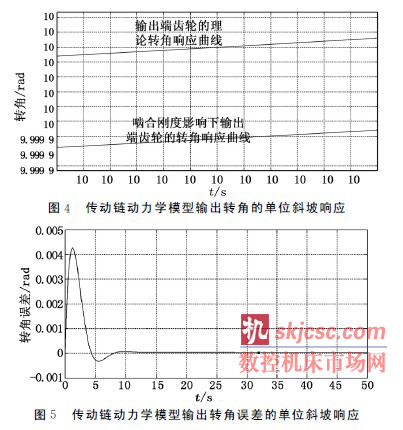
运用MATLAB软件对转角传递函数进行单位斜坡响应分析,得到的曲线如图4、图5所示。
4 结论
由图4、图5可得出如下结论:①在啮合刚度影响下的传动链转角的输出曲线与输入曲线之间存在着转角误差,这会影响该机床传动链的传动精度和传递的准确性;②转角误差响应曲线经过一定的震荡后期后,稳定为一条水平的直线,这表明啮合刚度影响下的传动链转角误差是一个不随时间变化的恒定;③齿轮的理论转角相应曲线的斜率与啮合刚度模型下的转角响应曲线斜率基本相同,说明啮合刚度对传动链的传动比基本没有影响。
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com