基于刚体动力学的五轴数控机床模拟系统研究
2016-8-1 来源:天津职业技术师范大学 作者:岳刚
把操作者手工编写或通过软件自动编写的工件加工程序,翻译成运动控制卡可以识别的刀具路径轨迹,是数控系统的主要工作之一。这个识别过程实际上是将工件加工程序中工件坐标系中的刀具路径轨迹经过一定的计算[20],转变成为机床坐标系中的刀具路径轨迹。所以必须正确的对刀具路径轨迹进行运动求解计算才能实现该过程。五轴数控机床通过在三个线性轴运动的基础之上增加了两个回转轴的运动[21],其运动的复杂性也相应的增加,对于编程人员和机床操作人员来讲,增加了一定的难度。对五轴数控机床进行正确的运动求解,有利于深入掌握它的运动规律,最大程度地发挥其在加工中高效、高精等优势。
从数学的角度讲,物体运动求解的本质就是三维图形的线性变换,其中包括基础线性变换,诸如平移变换、旋转变换等。当前国内外相关行业的研发人员已开始对适合五轴数控机床进行分析的通用算法的探究,不过目前针对五轴数控机床的运动分析大多是在假定机床所有移动轴一一正交等限制条件下进行的[22],并且也没有考虑机床本身的制造精度。所以,综合考虑多因子的五轴数控机床运动分析理论的探究是今后五轴数控机床运动学探究最主要的领域之一。
本章在描述了运动分析时所必须借助的基础线性代数原理,分别例举了采用三种非常普遍的构成形式的五轴数控机床在一定的限制条件下的运动分析算法。因为机床的制造精度与安装精度有一定限制,故对于五轴数控机床进行运动分析还需要结合机床自身具有的许多误差,来修正这些误差对工件切削精度的影响。
3.1 运动分析
在三维空间中,任何物体的运动方式都可以概括为几何体的平移、旋转等许多基础的线性变换[23]。从线性代数的角度讲,这些变换全部可以看做几何体的几何变换,因此又把几何体的线性变换称为几何变换,上述的变换能够通过线性代数中的矩阵乘法来完成。

3.1.1 平移变换
几何体在三维空间从一个坐标点沿着任意直线运动到另一个坐标点的过程叫做平移变换[23],在整个变换中不会使几何体的外形和尺寸发生变化。对应的齐次方程为:

假定空间几何体的起始位置为(x,y,z),在整个运动过程中,几何体沿着 X、Y、Z 三个方向各运动了 u、v、w 个单位长度,运动结束后,新的位置为(X、Y、Z),那么该几何体的位置变换对应的方程为:

3.1.2 旋转变换
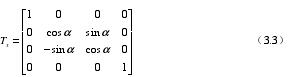
所谓旋转变换,就是让某个物体绕着 X、Y、Z 三个轴中的一个轴旋转一个角度。此时,可以利用右手螺旋法则来判断转角的正负[24][36]。(1)围绕 X 轴转动,X 方向坐标不发生变化,只有 Y、Z 两个方向坐标发生变化。对应的方程为:
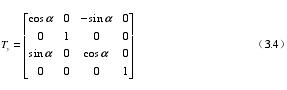
(2)围绕 Y 轴转动,Y 方向坐标不发生变化,只有 Z、X 两个方向坐标发生变化。对应的方程为:
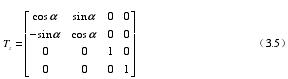
(3)围绕 Z 轴转动,Z 方向坐标不发生变化,只有 X、Y 两个方向坐标发生变化。对应的方程为:
3.1.2.1 围绕过(0,0)点的任意直线的旋转变换
直线 OD 是给定三维坐标系中过(0,0)点的任意直线,点 F 是坐标系中任一不在直线OD 上的点,若点 F 围绕直线 OD 转动后与 G 点重合,那么相应旋转变换的计算方法为[25]:
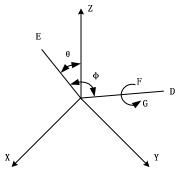
图3-1 绕过坐标原点直线的旋转
(1)令直线 OD围绕 X 轴转动转角后与面 XOZ 重合,新的直线成为 OE。这个变换能够用式 3-3 来完成。
(2)令直线 OE 围绕 Y 轴转动转角 θ 后与 z轴重合,这个变换能够用式 3-4 来完成。
(3)使用式 3-5 令点 P 围绕 Z 轴转动转角 α。
(4)运算和(2)中互逆,也就是令直线 OE 围绕 Y 轴旋转转角-θ,即使用式 3-4 的互逆矩阵来完成。
(5)运算和(1)中互逆,即使用式 3-3 的互逆矩阵来完成。最后能够获得围绕过(0,0)点的任意直线 OD 的旋转矩阵1 1R x y z y xT T T T T T= 。
3.1.2.2 围绕过其他已知点的任一直线的旋转变换
L 是三维空间中过点的任一直线,它的方向向量是,那么空间几何体围绕直线 L 转动转角的相应转换能够分为如下三步:
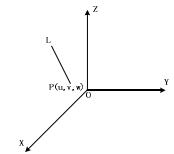
图 3-2 绕过任意点 P 直线的旋转变换
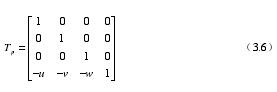
(1)通过空间几何体与直线 L 共同进行平移令点 P 移动到(0,0)点位置,转换矩阵pT为:
(2)在前一个步骤完成之后,令空间几何体围绕 L 转动转角α ,对应转换矩阵是RT 。
(3)令空间几何体与 L 共同进行平移变换回到最初坐标,对应转换矩阵是1PT:

最后,能够获得总的转换矩阵:
3.2 常见五轴数控机床的构造模式
从三维几何的角度讲,每一个物体都拥有六个独立的自由度[27]。举个例子,对于一个工件来说,工件的位置是固定的,所以,对于工件来说,主轴就具备了六个独立的自由度。在加工过程中,主轴上的刀具对工件进行切削,这时刀具轴线也就是主轴轴线和工件之间的距离受到刀具半径的限制,因而实际上只有五个自由度可用,理论上讲实现五轴联动就可以完成所有空间复杂曲面的加工[28]。
五轴数控机床通常指拥有五个以上可联动轴的数控机床[29],依据不同的自由度组合方式也就是固定或变相固定哪一个的自由度,理论上能够形成成四种不同的组合,依次为:X、Y、Z 三个轴方向上的自由度和绕任意两个轴回转的自由度组合、任意两个直线方向自由度和三个回转自由度组合、一个直线方向自由度和四个回转自由度组合、五个回转自由度。但在实际使用过程中,需要考虑机床的综合性能,特别是加工精度、系统寿命等关键要素,所以,当前市场上常见的五轴数控机床都普遍采用第一种方式的自由度组合[30]。依据不同的回转自由度,还能够对五轴联动数控机床进行细分,可以分为三种,分别是:双旋转主轴头式、双回转工作台式、一回转工作台加一旋转主轴头式[31]。
(1)双旋转主轴头式
双旋转主轴头式的五轴联动数控机床示意图如图 3-1 所示。从图中能够发现,机床的两个回转自由度全部布置在主轴上,使得刀具能够前后左右进行摆动,这样理论上可以使刀具绕中心点转动到任意位姿[32],对于此类机床,其工作台无需进行转动,因此工作台的大小不受约束,允许设计者设计大型机床。这样的布置形式的特点在于机床整体承载性能大大增强[33],同时加工空间也基本不受限制,其加工对象为大型工件,所以大型龙门式五轴联动数控机床普遍的采用这种结构。此类机床两个旋转轴全部集中到了刀具的上部,回转轴部分结构紧凑,加工过程灵活;同时缺点也很明显,因为主轴头集成的摆动机构与传动机构过于复杂,使得整个机床的刚度被大大降低。
(2)一回转工作台加一旋转主轴头式
这种类型的机床通过在机床的主轴头上面加一个回转自由度,另外一个回转自由度加在工作台上,主要通过加载在主轴和工作台上的两个方向的回转自由度,这样布置的好处就是两个回转轴的轴线方向都是固定不变的[33],其示意图如图3-2 所示。这种结构的五轴机床,因为两个方向的回转运动并未集中在一起,所以采用这类布置方式的五轴数控机床优点是结构简单、整体刚性好,缺点是灵活性不好。由于只有一个回转自由度在工作台上,导致整个机床的承载性能差,并且只能承担的尺寸相对较小的加工任务,通常用来进行中等尺寸工件的切削。
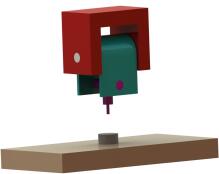
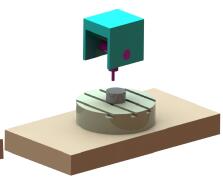
图3 -1双旋转主轴头结构五轴机床 图3 - 2一摆动头和一回转台结构五轴机床
(3)双回转工作台式
这种类型的五轴联动数控机床(图3-3)是由工作台承担两个回转自由度的,因为主轴和工作台的运动是相对的,所以不论旋转自由度布置在主轴上还是布置在工作台上,都能达到同样的加工效果从传动链的先后顺序能够知道,采用这种布置方式的机床的两个旋转轴有一个是定轴另一个是动轴。定轴就是指远离工件的只具备一个旋转自由度的轴[34],这个轴围绕的轴线方向在加工过程中是不会改变的;动轴是指跟着加工工件一同摆动的旋转轴,其所围绕的旋转轴线方向跟着一个定轴的运动而旋转。采用这种布置方式的机床承载性能最差,加工尺寸范围最小,整个系统刚性处于中等水平,通常用于中小尺寸工件的切削加工[35]。
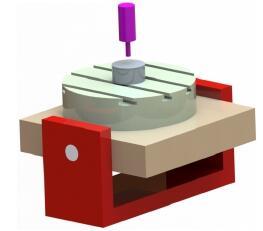
图3-3双回转工作台结构五轴机床
综上所述,无论五轴机床采用哪种布置方式,都同样可以做到刀具对工件的任意角度切削。因为机床拥有两个旋转自由度,刀具可以在机床结构的限制下的任意空间角度对工件进行切削。在相应运动控制算法的支持下,能够确保在整个切削过程中,刀具按照最佳的位姿来加工,而且可以防止机床发生运动干涉[36]。所以,五轴联动数控机床具备三轴、四轴机床所不具备的的优越的性能,能完成分任务更多,同时精度会更高[37]。
重点研发五轴数控机床模拟训练机的意义在于:学习数控系统最好的方式是在实际机床上进行练习,但是这样需要大量的五轴数控机床,这对于学校来说是不现实的[38]。五轴数控机床模拟训练机是国内首创能够解决数控系统教学问题、数控编程人员学习问题的一个关键产品。
3.3 五轴数控机床的运动求解
3.3.1 双转台型五轴数控机床的运动求解
双回转台型五轴数控机床按照旋转轴的不同,能够具体分为 AB、BC、AC 三种[39]。因为这三种不同选择方式的运动变换计算过程没有太大差别,所以在这里只探讨了最常见的 AC 型组合方式的运动变换计算过程[40]。
传统三轴数控机床只具备 X、Y、Z 三个直线方向的自由度[41],所以没有必要进行其他的分析、数学建模、运算,只需要将程序中的有关路径控制方面的 G 代码翻译成 XY、Z 三个轴方向上的运动量,然后再进行联合插补运动,最终就能够驱动三个运动轴切削工件。五轴数控机床除了拥有 X、Y、Z 三个轴之外还有另外两个回转轴[42],使得刀具可以相对于工件做直线移动和回转运动,所以在刀路运动计算上,需要六个数据来表达某一瞬时的刀尖点位置及刀具轴线位姿:(X, y , z )表示加工刀尖点的位置,( i , j , k )表示加工刀具轴线的位姿[43]。
在五轴机床中,刀具在对工件进行切削之前,需要严格采用五轴机床上的结构形式对其整个运动、切削过程进行运动学分析,找出工件坐标系与机床坐标系的联系,推算出其中的转换矩阵,充分利用这个转换矩阵[44],能够精确的转换某一瞬时的刀尖点位置及刀具轴线位姿为 X、Y、Z 三个轴的移动和 A 、C 两个旋转轴的转动,这一点是保证数控程序能够正确被编译的基础。本节会针对此推导过程做详细讨论[45]。
如图 3-4 所示,记工件原点坐标系为m m m0X Y Z ,机床原点坐标系为t t tO X Y Z ,以 A、C两轴中心线交点作为机床坐标原点[46]。工件原点坐标系m m mO X Y Z 和机床原点坐标系t t tO X Y Z 共享同一个 Z 轴方向,m t0 O =d 。工作台的回转能够带动毛坯进行位姿变换,其中 A、C 两轴的转动范围分别为 0°≤A≤90°、0°≤C≤3600°。
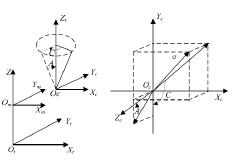

图 3-4 坐标系 图3 - 5双转台型五轴数控机床坐标系
为了方便以后的计算,需要定义一下计算过程中用到的坐标系:令零件坐标系为w w w wO X Y Z ,零件能够在两个回转轴的运动中完成围绕 X 轴转动转角 A( 0° ≤A ≤90° ),围绕 Z 轴转动转角 C;机床的移动坐标系为r r r rO X Y Z 。同时,w rO O =d ,如图 3-5 所示;当前刀具的刀心点0C ,其在零件坐标系内的坐标假定为(0 0 0, ,C C CX Y Z );当前刀具的轴线假定为α (单位矢量),其在零件坐标系内假定为( , ,)x y zα α α[48]。
在以上设定的基础上,AC 型组合方式的运动变换计算过程具体如下:
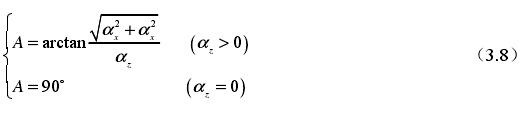
(1)首先将刀具轴线α 移动到经过零件坐标系的原点,之后令它围绕 Z 轴转动到平面(-Y)(+Z)内,最后把刀具轴线α 围绕 X 轴转动到和 Z 轴重合[49]。以上工作的出发点是要确保当 0zα ≥ 时,令刀具轴线 α 围绕 X 轴转动转角处于 (90° 0°) 之间,也就是刀具相对于零件围绕 X 轴转动转角处于(0° 90°) 之间。
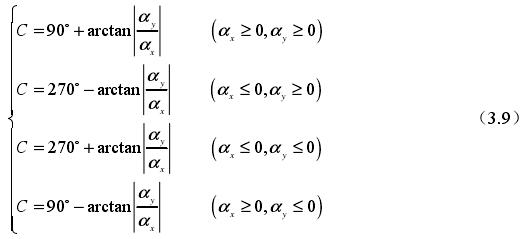
(2)将刀具轴线α 的转动转化成刀具的旋转或移动:首先让刀具围绕 X 轴转动某个角度 A,再将刀具围绕五轴机床德尔 Z 轴转动一定角度 C。所以能够获得 A 角的运算过程如下:

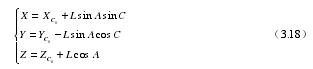
(3)零件坐标改变后,刀具的中心点0C 坐标值也会发生变化,则机床坐标系内的坐标值 X、Y、Z 的运算方法为:
1)对零件工件坐标系w w w wO X Y Z 进行移动,使得两个坐标系的rO 和wO 重合,相应的转换矩阵是:

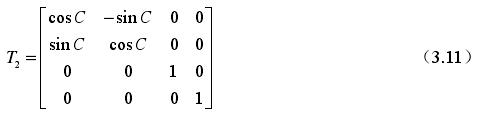
2)使零件围绕五轴数控机床的 Z 轴转动角度 C,对应的转换矩阵是:
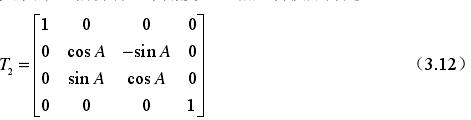
3)使零件围绕五轴数控机床的 X 轴转动一个角度 A,相应转换矩阵是:
则有:
将上式展开可得:

3.3.2 双摆头型五轴数控机床的运动求解
双摆头型五轴数控机床根据不同的旋转轴,可以细分为三种方式[50]。因为这三种不同选择方式的运动变换计算过程没有太大差别,所以在这里只探讨了最常见的 X,Y,Z,A,C 组合方式的运动变换计算过程[51]。
首先,初定零件坐标系为w w w wO X Y Z ,假定让刀具绕 Z 轴旋转一定角度 C,再让刀具围绕 X 轴旋转一定角度 A(0 ≤A ≤90);假定刀具的转动中心0hC 至刀心点0C 的空间上的直线距离是 L,如图 3-6 所示。此时,刀心点0C 处在零件坐标系内的位置为0 0 0(, , )C C CX Y Z ,同时,刀具轴线α (单位矢量)在零件坐标系内可用( , , )x y zα α α 来表示。那么,机床坐标系内移动变换可以表示为:
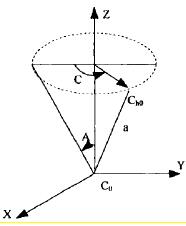
图 3-6 双摆头型五轴数控机床坐标系
A、C 角的计算过程和前一节里的计算过程并无差别,在这里就省略了。
刀具中心0hC 在刀具旋转和移动后位于零件坐标系w w w wO X Y Z 内的坐标,就是机床坐标系下 X,Y,Z 坐标值,其计算过程为:
(1)如图所示,刀具中心以刀心点0hC 为固定点转动转角0C ,围绕 X 轴转动转角 A,它的转换矩阵是:
(2)刀具中心以刀心点0hC 为固定点转动转角0C ,围绕 Y 轴旋转转角 C,它的转换矩阵是:
(3)经过以上转换之后,刀具中心位于零件坐标内的位置能够通过下面的方程来计算:
将上式展开得:
3.3.3 非正交五轴数控机床的运动求解
这种运动方式的求解与以上两类运动变换相似,计算过程并没有很大的差别,非正交结构五轴数控机床的运动可以具体划分为几下三步进行变换计算[52]:
(1)计算从零件坐标系转换至机床坐标系的位置转换矩阵。
(2)计算相对于起始点的两个转动轴的转角。
(3)把零件坐标系内具体的刀位点位置变换成实际机床坐标系中的坐标值[53]。因为本文具体讨论的是双转台正交构造的五轴数控机床,并且非正交构造五轴数控机床的移动变换计算过程相对繁琐,所以本文不讨论。
3.4 本章小结
伴随着电子计算机科技、数字控制算法的飞速进步,切削加工工件复杂程度的增加等,五轴数控机床在构造构成以及数字控制算法上均表现出多样化的发展态势[54]。本章首先阐述了平移、旋转等对机床进行运动求解时必需的一些基本数学理论。接着从结构形加工性能等角度,对双转台型、双摆头型、摆头转台型以及非正交型五轴数控机床进行了详细的介绍,并详细了研究了上述几种常见类型机床的运动求解算法[55]。本章在描述了运动分析时所必须借助的基础线性代数原理,分别例举了采用三种非常普遍的构成形式的五轴数控机床在一定的限制条件下的运动分析算法[56]。同时,为下一章的进一步研究做了铺垫,为模拟机训练系统操作模块研究奠定了基础。
投稿箱:
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com
更多本专题新闻
名企推荐







专题点击前十
| 更多