


基于 VERICUT 的 CKA6150 数控车床 仿真研究
2017-12-12 来源:天津机电职业技术学院产学研中心 作者:赵华,李卫兵
摘要:针对在企业生产和教育培训领域广泛使用的 CKA6150 数控车床,在 VERICUT 中构建仿真模型,对仿真机床构建的一般方法和步骤进行探讨,给出了构建过程中的注意事项和一些实用技巧。以数控车床防护门及四工位回转刀架的控制为例,重点研究了通过宏命令子程序及特殊控制指令定制来控制机床部件运动的方法。通过一个仿真实例的运行,验证了所构建仿真机床的正确性,为宏程序及其它复杂车削工件加工程序校验及教学培训提供可靠的 CKA6150 仿真。
关键词:;CKA6150 数控车床;宏命令;仿真
VERICUT 是一款专业的数控加工仿真软件,可以对各种数控加工设备的加工过程进行仿真,广泛应用于生产和培训领域[1]。VERICUT为用户提供了丰富的机床及系统样本库,但尚不完善,数控车床案例缺乏,样本机床形式单一,难以实现复杂运动的控制[2]。因此,本文针对数控卧式车床 CKA6150 进行仿真研究,对构建仿真加工环境的一般方法和步骤进行探讨,对通过宏命令子程序及自定义高级指令来进行机床附件控制的方法进行重点研究。
1 、机床构建
CKA6150 数控车床是大连机床厂生产的一款纵(Z)、横(X)两坐标控制的数控卧式车床,配有华中世纪星的数控系统 HNC-21T。CKA6150 数控车床采用的是平床身结构,配有气动卡盘和四工位回转刀架,结构及主要组成部件如图 1 所示。

图 1 CKA6150 数控车床结构及主要部件
分析 CKA6150 数控车床各部件之间的运动关系,组合关系和相对位置关系,根据说明书中的几何参数,在 Solid Works 软件中建立简化的机床 3D 模型如图 2 所示。在建立装配体时一定要注意绘图区左下角的坐标系要和数控车床坐标系一致(笛卡尔直角坐标系),以便输出的 STL 模型在导入 VERICUT 后能够配置出正确的运动方向。
在 Solid Works 软件中把整个 3D 模型装配体另存为 STL 格式导入 VERICUT,进行机床各部件的功能配置。VERICUT 软件提供了不同类型的 Component(组件),如 Base(床身)、Spindle(主轴)、X Linear(X 轴)、Z Linear(Z 轴)、Turret(刀架)、Stock(毛坯)等。通过建立不同类型的 Component(组件)并添加 3D 模型到某一类型的 Component(组件),对导入 VERICUT 的每一个 3D 模型进行功能配置。各个 Component(组件)之间可以设置从属或者并列的关系,根据数控车床各部件之间的实际运动层次关系建立 Project Tree(项目树),即机床部件运动拓扑关系。CKA6150 数控车床 Project Tree(项目树)及各部件名称及Component(组件)类型如图 3 所示。

图 2 CKA6150 数控车床 3D 模型
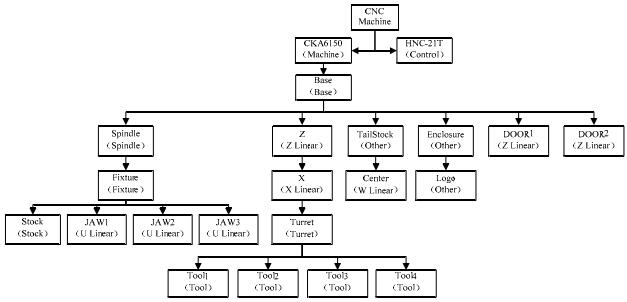
图 3 CKA6150 数控车床 Project Tree 简图
VERICUT 机床构建过程中,一个重要的环节是坐标系的建立及各部件坐标位置的调整。VERICUT 中可以建立多个坐标系,并设置其中之一作为当前坐标,同时 VERICUT 还具有多个性质的坐标系,如 ZModel、ZComponent、ZMachine 等。每一个 Component(组件)都有一个组件坐标系 ZComponent,它决定着该Component(组件)的运动方向。组件坐标系随着 Component(组件)位置的改变而改变。
Component(组件)的位置及其 Component(组件)下属的 3D 模型位置决定着屏幕上 3D 模型的实际位置,正确理解这一点,对正确构建仿真模型极其重要。对于四工位回转刀架 Turret可以借助 Configure Component>Turret Aid 进行设置。但是由于 VERICUT 默认的回转刀架回转轴与 Z 轴平行,这时就需要沿 Turret 的组件坐标系的 X 轴旋转 90°,可以通过 Configure Component>Rotate>Angles,设置旋转角度为(90 0 0),同时把 Turret 下属的所有 3D 模型沿相反方向旋转 90°,即设置旋转角度为(-90 0 0),才能得到正确的回转刀架运动。对于三爪卡盘,只设置 U Linear(U 轴)一种 Component(组件),然后通过对相应组件坐标系的设置来调整卡爪的实际运动方向,这样可以简化控制系统的定义。具体操作方法为,复制 JAW1两次,分别重命名为 JAW2 和 JAW3,通过Configure Component > Rotate > Angles 设 置JAW2 的旋转角度为(0 0 120),JAW3 的旋转角度为(0 0 -120)。
2 、系统配置
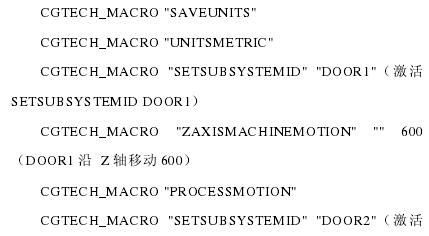
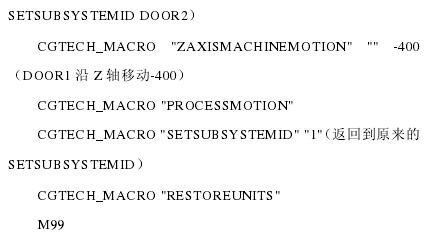
CKA6150 数控车床配置了华中世纪星的数控系统 HNC-21T。由于该系统与 FUNAC 系统非常相似,因此可以直接调用 FUNAC 0T 作为模板进行配置,下面以机床防护门及三爪卡盘的控制为例,探讨系统高级控制功能的配置。 由于机床防护门 DOOR1 和 DOOR2 都采用了 Z Linear(Z 轴)作为 Component(组件)类型,为了加以区分,通过 Configure Component>Component>Sub System 进行 Sub System 的ID 设置,分别设置为 DOOR1 和 DOOR2。本文采用在 NC Subroutines 添加子程序,在数控程序调用子程序的方式实现控制,例如关门子程序及注释如下所示。
对于三爪卡盘,由于已经通过对相应组件坐标系的设置,使每一个卡爪的运动方向 U 和整个机床的 X 方向平行,因此可以通过统一的指令设置来实现三个卡爪的同时向心运动。任何数控编码(指令、变量及字符)都必须首先进行字格式的预定义,才能被虚拟数控系统识别和解释[3]。通过 Configuration>Word Format>Add 对卡盘控制所需的字格式进行定义,如图 4所示。
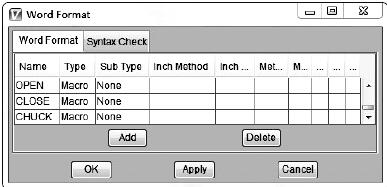
图 4 字格式的定义
字格式定义之后,通过 Configuration>G-Code Processing>Add 对这些字的功能进行配置。由于三爪卡盘的初始状态是张开的极限位置,因此卡爪松开控制时,卡爪相对初始位置无需移动,通过字 OPEN 调用 VERICUT 的宏命令 UAxis Machine Motion(U 轴移动)使卡爪沿各自组件坐标系的 X 轴移动距离为 0;卡爪夹紧控制时,通过字 CLOSE 调用宏命令UAxis Machine Motion 使卡爪沿各自组件坐标系的 X轴移动,调用宏命令 Component Name(接触到的零件名称)及 Touch(保持运动直到接触到某工件)使爪接触到 Stock(工件)后停止运动。具体定义如图 5 所示,指令 OPEN CHUCK 使卡爪松开,指令 CLOSE CHUCK 使卡爪夹紧工件。
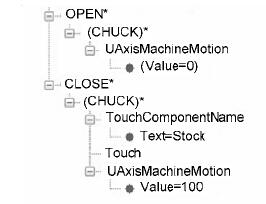
图 5 卡爪控制指令配置
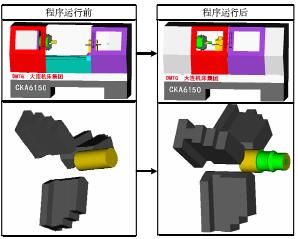
图 6 仿真实例验证结果
3 、结语
基于 VERICUT 虚拟加工仿真软件,本文构建了 CKA6150 数控车床,介绍了仿真机床构建的一般方法和步骤,探讨了构建过程中一些实用技巧,重点研究了子程序及特殊控制指令的定制方法,给出了数控车床防护门和四工位回转刀架的控制指令的配置方法。在该仿真机床上对一个外轮廓车削的教学实例进行仿真加工,程序运行前后如图 6 所示,验证了本文所构建的仿真机床的正确性。
投稿箱:
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com
更多相关信息

