



软体机器人结构机理与驱动材料研究综述
2017-1-12 来源:浙江大学工程力学系 作者:李铁风 李国瑞 梁艺鸣 程听雨杨栩旭黄志
摘要:软体机器人是一类新型机器人,具有结构柔软度高,环境适应性好,亲和性强,功能多样等特点,有着十分广阔的研究和应用前景. 智能材料在软体机器人结构设计及实际应用中扮演了重要的角色,其特殊的驱动机制极大拓展了软体机器人的功能. 介绍了软体机器人的发展和研究现状,按其应用场合及功能总结了几种典型的软体机器人. 从仿生机理的角度,介绍了蠕虫、弯曲爬行虫、鱼类游动等几类仿生运动机理以及其相应的软体机器人. 还按不同驱动类型将软体机器人归纳为气动、形状记忆合金、离子交换聚合物金属复合材料、介电高弹体、响应水凝胶、化学燃烧驱动等类型. 介绍了软体机器人的制作方法与工艺,分析了目前软体机器人研究的主要挑战,提出对未来研究的展望.
关键词:软体机器人,智能材料,仿生机理
0.引言
随着人类生产生活的不断发展,机器人学、自动控制理论的不断进步,人类对于机器人技术的需求不断提升. 在人类不宜涉足的极端和危险的工程环境中,机器人为人类提供了很大的便利[1]. 传统的机器人结构通常由电机、活塞、关节、铰链等构件组装而成,尽管动力足、功率大、性能成熟,但是也存在很多缺点,例如笨重、安全系数低、环境适应性差、可靠性低、传动效率低下、噪声大等. 自然界生物的柔软的身体、优良的灵活性和强大的环境适应性为机器人的发展提供了新思路. 软体机器人以自然界的软体生物为原型,其躯体主要由可以承受大变形的弹性材料构成,可以连续地变形,具有极高的自由度. 通过模仿软体动物的运动,这种机器人可以实现蠕动、扭转、爬行、游动等运动形式[2]. 软体机器人可以根据实际需要任意地改变自身形状和尺寸,在更加复杂的环境中作业. 此外,相比于传统的硬质机器人,软体机器人具有更高的安全性和更好的环境相容性,更加适合服务业和医疗领域. 基于以上优点,软体机器人在工业生产、医疗服务、军事侦察等领域都有着很好的潜力.
智能材料是指在电、光、热、催化剂等外界激励下表现出特有功能响应的材料[3-7]. 这些功能响应可以是变形、化学反应、荧光等. 近年来,智能材料在机器人领域扮演了重要角色,例如气动、shapememory alloy (SMA)、ionic polymer metal composite(IPMC)、dielectric elastomer (DE)、响应水凝胶机器人等. 目前,智能材料在机器人方面已经得到了很好的应用,由智能材料驱动的软体机器人具有灵活、体积小、质量轻、环境适应性好、噪声低等优势.
本文介绍了软体机器人的研究现状、结构机理、驱动类型、结构成型,分析了其中的技术难点并对未来的研究做出了展望.
1.研究现状
软体机器人是一种新型的机器人,是机器人研究的拓展. 软体机器人具有良好的灵活性、环境适应性,在工业生产、医疗服务、军事探测等方面具有广阔的应用前景,软体机器人已经成为了机器人领域的研究热点. 目前,科学家们对软体机器人的研究仍处于初步阶段. 现有的软体机器人按照结构机理可分为:(1) 扑翼式[8-14]、摆尾式[15-17]、喷射式水中机器人[18-21],(2) 蠕动式[22-27]、弯曲爬行机器人[28-33],(3) 抓取机器人[34-38] 和(4) 跳跃机器人[39-40] 等.2007 年,美国国防部高等研究计划局(DARPA)提出化学机器人Chembots 的研究计划,并由塔夫斯大学(Tufts University) 承担. 该化学机器人结合了机器人学和材料化学,采用软材料制成,甚至呈现液态状,可以自由变形,穿越狭窄的孔隙[41]. 在欧洲委员会的资助下,欧洲5 个国家的研究机构成立了“章鱼触手” 项目组. 该项目于2009 年2 月启动,2013 年完成,主要是开发软体水下章鱼机器人原型,研究章鱼机器人的传感、驱动和相应的控制方法[42-44]. 塔夫斯大学Barry A. Trimmer 研究组在DARPA 的资助下研发的GoQBot 机器人[28] 以弯曲爬行虫为原型,由形状记忆合金(SMA) 驱动,能够实现爬行,翻滚等运动形式. 麻省理工学院、哈佛大学和韩国汉城国立大学合作研发的Meshworm 机器人[22] 由形状记忆合金丝驱动,可以模仿蚯蚓的蠕动. 哈佛大学的GorgeM. Whitesides 研究组研发了一系列气动软体机器人[23;34-35;45-46]、内燃驱动软体机器人[39-40],可以实现爬行、跳跃、抓取等运动形式. 此外还有康奈尔大学的集可发光人造皮肤与充气结构为一体的软体机器人[24] 等. 日本冈山大学的仿蝠鲼软体机器鱼也采用气动的驱动方式[9],可以实现直行和转弯. 在响应凝胶驱动方面,日本早稻田大学采用自震荡响应凝胶研发了仿生尺蠖[29],可以在无外界激励条件下实现周期性伸缩运动. 弗吉尼亚大学仿生工程实验研发的仿生蝠鲼机器鱼则用IPMC 驱动[10],可以实现多种运动模式.
2.结构机理
软体动物的结构和运动形式为软体机器人的设计提供了很好的参考. 现有的软体机器人主要分为爬行机器人、游泳机器人、抓取机器人以及跳跃机器人. 其中爬行机器人包括蠕动机器人、弯曲爬行机器人,游泳软体机器人包括仿生扑翼式软体机器鱼、波动鳍软体机器鱼、摆尾式软体机器鱼、仿生乌贼和仿生水母等,抓取机器人包括抓持式机器人、电吸附式机器人,跳跃机器人有单足跳跃机器人、
多足跳跃机器人等. 本章将对各类不同结构机理的软体机器人归纳分类.
2.1 蠕虫和弯曲爬行虫
蠕虫的躯体是典型的流体静力骨骼(hydrostaticskeleton) 结构,由表皮、肌肉、体液和神经系统组成.以蚯蚓为例,它的肌肉属于斜纹肌,肌肉构成封闭的体腔,内部充满体液,形成静水骨骼结构. 蚯蚓的肌肉占全身体积的40%,由环肌和纵肌组成. 当某个体节纵肌收缩时,该体节直径增大,当环肌收缩时,该体节的直径减小,长度增大. 蚯蚓就是通过各个体节之间的肌肉收缩产生的行进波来实现向前的运动.麻省理工学院仿生机器人实验室首先采用SMA 作为驱动器开发出仿生蚯蚓机器人Meshworm[22]. 蚯蚓和Meshworm 的身体结构分别如图1(a) 和图1(b)所示.
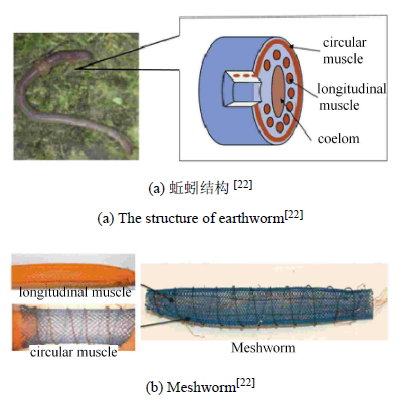
图1 蚯蚓身体结构和Meshworm
弯曲爬行虫的躯体结构也属于流体静力骨骼结构,其肌肉组织包含斜肌、纵肌以及小块肌肉,构成了复杂的肌肉组织. 通过控制脚和基底之间的压力变化和身体的张力,它可以实现向前的爬行运动和穿越障碍. 塔夫斯大学Barry A. Trimmer 实验室研发的仿生毛虫机器人GoQBot[28],由SMA 驱动,能够实现爬行、翻滚等运动形式,弯曲爬行虫和GoQBot的身体结构分别如图2(a) 和图2(b) 所示.
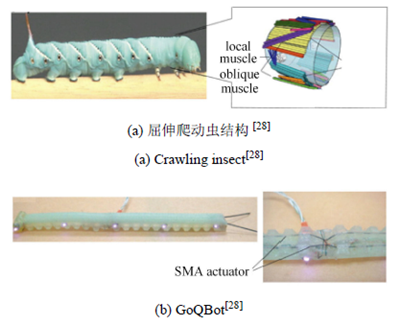
图2 弯曲爬行虫和GoQBot
2.2 水中机器人
按照游动方式,水中生物的运动方式可以分为扑翼式(蝠鲼)、尾鳍摆动式以及喷射式(乌贼、水母).摆尾式机器鱼通过自身肌肉的交替伸缩实现身体的摆动,从而带动尾鳍周期性摆动获取水动力实现推进. 摆尾式鱼类以及麻省理工学院开发的软体机器鱼[15] 如图3(a) 和图3(b) 所示. 典型扑翼式鱼为蝠鲼,它们通过胸鳍周期性的扑动实现推进,扑翼鱼类以及北京航空航天大学开发的仿生机器鱼[8] 分别如图3(c) 和图3(d) 所示. 水母通过收缩外壳的方式挤压内腔,可以改变自身内腔的体积,实现喷水推进. 自然界中的水母与弗吉尼亚理工大学开发的SMA 驱动的软体机器水母[18] 分别如图3(e) 和图3(f)所示.
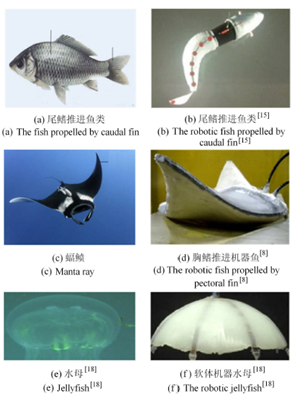
图3 水中生物原型和软体水中机器人
2.3 其他
此外,软体机器人类型还有跳跃式机器人[39-40]、软体抓取结构[34-38]、行走机器人[47-48]以及滚动机器人[49] 等. 这几类机器人的驱动机制,受到自然界中例如蝗虫和跳蚤蓄力爆发跳跃(跳跃式机器人),章鱼多触手变形抓取(软体抓取结构),甲壳虫多足爬行(行走机器人) 等原型启发. 这些机器人的结构机理与驱动行为将在下一章中具体介绍.
3.驱动类型
3.1 气动软体机器人
气动软体机器人是指通过在结构中充气,利用气压使结构产生变形或者运动,从而实现驱动的一类软体机器人. 哈佛大学George M. Whitesides 研究组研发出了充气式蠕动软体机器人[23],如图4(a) 所示. 该软体机器人身长约12.7 cm,通过充气产生运动,可以穿越障碍,进入狭小空间,并且具备很强的抗冲击性能. 该团队还研发了充气式驱动器[45]、抓取机器人[34-35] 等等. 康奈尔大学的Larson 等[24] 开发了一种拉伸性能很好且具有电致发光功能的人造皮肤,并将这种电子皮肤整合到充气式软体机器人中,展现了软体机器人在运动过程中的发光效果见图4(b). Brown 等[36] 研发的球形软体抓手,通过抽气改变气压的方式实现抓取,如图4(c) 所示.
日本冈山大学研发了气动软体机器鱼[9],如图4(d) 所示. 该机器鱼模仿蝠鲼的外形和推进机理. 该机器鱼的躯体材料为硅橡胶,体长为150mm,体宽为170mm,通过气动阀进行驱动,最大游动速度可达100mm/s. 北京航空航天大学机器人研究所研发了一款气动仿生蝠鲼机器鱼[8]. 该机器鱼的主体为硅橡胶,翼展560mm,身长320mm,最大游动速度为0.5 倍身长每秒. 气动机器人具有变形大、运动灵活等优点,但是需要面临气源、控制等方面的挑战.
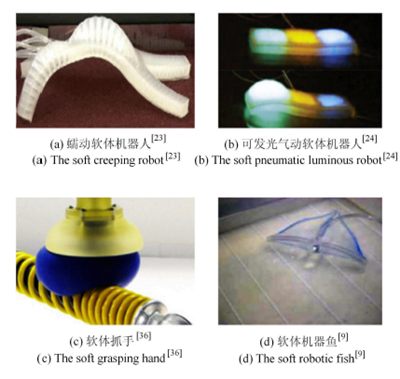
图4 气动机器人
3.2 形状记忆合金软体机器人
形状记忆合金(SMA) 是一种智能合金材料,在加热时能够恢复原始形状,消除低温状态下所发生的变形. 形状记忆合金的热力耦合行为源于材料本身的相变,例如热弹性马氏体相变. 在形状记忆合金中存在两种相,高温相奥氏体相和低温相马氏体相.马氏体一旦形成,就会随着温度下降而继续生长,如果温度上升它又会减少,以完全相反的过程消失.两项自由能之差作为相变驱动力,两项自由能相等的温度T0 称为平衡温度. 只有当温度低于平衡温度T0 时才会产生马氏体相变,反之,只有当温度高于平衡温度T0 时才会发生逆相变. 在SMA 中,马氏体相变不仅由温度引起,也可以由应力引起,这种由应力引起的马氏体相变叫做应力诱发马氏体相变,且相变温度同应力正相关. 形状记忆合金可以用于智能材料驱动器中.
Menciassi 等[25] 首先将SMA 驱动器应用于蠕虫的仿生机器人中,如图5(a) 所示. Menciassi 参考了蚯蚓的运动机制,将SMA 弹簧嵌入硅橡胶外壳中并串联成竹节状,配置好各节的驱动电流,运动速度可达0.22mm/s. 模仿生物爬行的软体机器人还有Du 等研发的3 种模式运动机器人[30],GoQBot 机器人[28],Meshworm 机器人[22]. Kim 等[11] 研发了一种通过SMA 驱动的仿生海龟,如图5(b) 所示. 它的最高游动速度为22.8mm/s. 此外,该研究组研发了一

图5 SMA 驱动机器人
款新型的SMA 仿生龟[12],其最大游动速度为11.5 cm/s. Wang 等[16] 设计了一种SMA 驱动的柔性鳍单元,如图5(c) 所示,并将其应用于仿蝠鲼机器人[13] 中,如图5(d) 所示. 文献[18-19] 模仿水母的运动,制作了可做沉浮运动的水下机器人. 此外,SMA还被应用于攀爬机器人[31],仿生飞行器[50-51],机器人面部表情驱动[52-53] 等.形状记忆合金驱动的机器人具有大驱动力、大驱动位移等优点,但是也存在温度难以控制、驱动频率低等问题.
3.3 IPMC 软体机器人
IPMC 的全称是离子交换聚合物金属复合材料,是一种电致变形的智能材料(离子型). IPMC 材料由Nafion 锂子交换薄膜和电极组成. 在含水状态下,聚合物薄膜中的阳离子(例如钠离子和钙离子)可以自由移动,阴离子固定在碳链中不能移动. 在IPMC 电极的两端施加上电压时,在电极之间会产生电场. 在电场的作用下,水合的阳离子向负极移动,而阴离子的位置固定不变. 从而导致IPMC 的负极溶胀,正极收缩而导致IPMC 弯曲变形.IPMC 具有变形灵活、可重复,大位移,低电压驱动,响应速度快等特点. 基于IPMC 的这些特点,可以广泛地用于智能材料机器人的驱动器中,尤其适用于水环境机器人,如仿生机器鱼、机器水母等.
Hubbard 等[14] 将IPMC 应用于仿生机器鱼中,用于驱动机器鱼的胸鳍和尾鳍. 该机器鱼的最大游动速度为28mm/s,如图6(a) 所示. Shen 等[17] 模仿鲸鱼的游动方式,使用IPMC 尾鳍研发了一款仿生机器鱼,并研究了其水动力性能,如图6(b) 所示. 弗吉尼亚大学仿生工程实验室研发了一款IPMC 驱动的仿生蝠鲼机器鱼[10],如图6(c) 所示. 该机器鱼的胸鳍由两侧的4 根IPMC 鳍条驱动,身长80mm,翼展180mm,最大游动速度为4.2mm/s. 弗吉尼亚理工大学将IPMC 驱动器嵌入聚烯烃薄膜中,开发出透明软体水母[20],如图6(d) 所示. 该水母的直径为164mm,高为50mm,重量为11 g,游动速度为1.5mm/s. 此外,伊朗沙力夫理工大学研发了一款IPMC 驱动的滚动机器人[49],如图6(e) 所示. 德克萨斯A&M 大学研发了一款IPMC 驱动的行走机器人[47],如图6(f) 所示. IPMC 驱动的机器人具有大输出位移、运动灵活等优点,而其主要不足有输出力较小,响应频率低、材料需要液体环境等.

图6 IPMC 机器人
3.4 介电高弹体软体机器人
介电高弹体(DE) 是一种典型的电致变形智能软材料(电子型). 聚丙烯酸类材料是一种典型的介电高弹体材料,在介电高弹体薄膜的两侧覆盖柔性电极,并施加驱动电压时,介电高弹体薄膜在电场力的作用下产生变形,导致厚度减小,面积扩张. 介电高弹体具有弹性模量低、质轻、能量密度大、响应速度快的优点. 介电高弹体可用于软体机器人驱动、柔性传感器、智能穿戴设备以及能量采集等.浙江大学工程力学系、浙江省软体机器人与智能器件研究重点实验室研究组基于介电高弹体的力电耦合特性,通过利用力电失稳实现了材料的极大电致变形[54],并可振动调频,能用于智能结构的驱动[55].此外,该研究小组还参考了弯曲爬行虫,海星等无脊椎动物,研发了一种小型的智能结构[32],如图7(a) 所示. 以该结构作为基本模块,可以制成多种形状的小型机器人. 在不同的预拉伸状态下以及不同的电压的驱动下,这种机器人的运动幅度也会随之改变. Kofod 基于介电高弹体材料做了三角状抓手[38],可以抓起轻质的柱状物体,如图7(b)所示. Jung 等[26] 以蠕虫为灵感,做成以介电材料为单元的驱动器,再以6 个基本单元为一组,做成一个二级的圆形单元,最后这种二级的圆形单元可以连接成任意长度的蠕虫机器人,可以实现1mm/s的爬行速度,如图7(c) 所示. Choi 等[56] 将多层介电材料薄膜制成的驱动器作为基本结构单元,以这种单元为基础组装成管状的智能机器人,如图7(d)所示. Pei 等[48] 基于介电高弹体材料,做成圆柱形驱动器单元,并组装成六足行走机器人或者首尾连接的蠕虫机器人,如图7(e) 所示. Zhao 等[57] 研发了一种扑翼结构,这种马鞍形状的介电材料的驱动器在5 000V,3 Hz 的驱动电压下,可以实现大于180。的角度变化,如图7(f) 所示. 这种扑翼结构也为空中飞行驱动器提供了一个很好的参考. 此外,Conn 等[27] 研发了一种结合气动与电动并以介电高弹体为材料的蠕虫机器人. 这种机器人是以介电高弹体薄膜封装的一个圆筒形结构为单元,并且可以将这些单元连接成不同长度的机器人. 该机器人在充气后,介电薄膜进入工作状态,施加电压后可以通过底部的运动结构产生的摩擦力前进. Branz等[58] 研发了一种以介电高弹体为基本材料的双
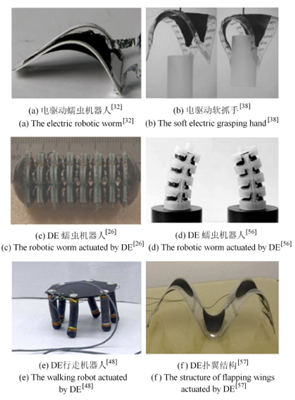
图7 DE 驱动机器人
轴机器人,这种机器人在水平x-z 方向和竖直x-y 方向分别有两个圆柱形的轴,在电的驱动下,介电薄膜会发生形变,带动两个轴运动,从而实现前进. Shintake等[37] 开发了一种电吸附式的介电高弹体软体抓手,可以抓起82.1 g 的物体. 介电高弹体机器人具有大驱动力、大驱动位移等优点,但也面临着驱动电压高等挑战.
3.5 响应水凝胶软体机器人
水凝胶是由亲水性的功能高分子,通过物理或化学作用交联形成三维网络结构,吸水溶胀而形成.响应水凝胶指能够对外部环境的变化产生响应性变化的水凝胶,如一些水凝胶能因外界温度、pH 值、光电信号、特殊化学分子等的微小变化,而产生相应的物理结构或化学结构的变化. 如一类具有低临界相转变温度(LCST) 的温敏水凝胶,其在温度低于LCST 时,表现为亲水性,而高于LCST 时相转变为疏水性. 水凝胶高分子网络的相转变使得水凝胶中的水分大量出入其中(温度升高缩水,降低吸水),从而使得水凝胶产生体积等形态变化. 又例如一类具有对酸碱度敏感的水凝胶,其高分子网络中含有可电离的阴离子基团(羧基、磺酸基等) 或阳离子基团(氨基等),外界pH 值的改变影响这些基团的电离情况,使得它们与水分子的结合情况也发生相应的改变,从而使水凝胶的体积形态随着pH 值的改变而发生变化. 由于智能水凝胶能够随外界环境变化,而产生形变,其可以作为智能驱动材料应用于柔性机器人驱动等领域[59].
Nakamaru 等[29] 以凝胶为材料,研发了一种外形简单,有着类似蠕虫的运动模式的仿生机器人. 这种机器人在不改变外界驱动方式和刺激的情况下可以自己通过自震荡的方式移动,如图8(a) 所示. Morales等[33] 研发了一种以水凝胶为基底的片状驱动器. 该驱动器分为两部分,分别作为机器人的两只脚,这两只脚分别为阴离子脚和阳离子脚,通过改变电极的方向使机器人产生不同方向的形变从而使其移动,如图8(b) 所示. Lee 等[60] 同样是以水凝胶作为基本材料,以自然界中的捕蝇草为灵感,制备了一种表面具有微流道的微型机器人,可以通过机器人表面的微流道吸水和失水时所产生的表面形变来使其运动.此外,Li 等[20] 用pH 值响应水凝胶开发了一款软体水母,该水母为磁驱动. 水凝胶机器人能够通过自身化学反应实现运动,但是面临驱动力小、难以精确控制的挑战.
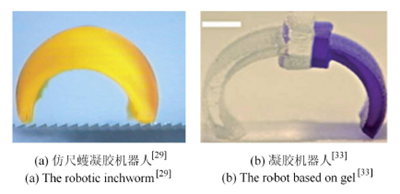
图8 水凝胶机器人
3.6 内燃软体机器人
Shepher 等[39] 研究组研发了一种三角状的有机弹性体机器人. 该机器人以甲烷与氧气燃烧反应使气体体积膨胀为驱动机制,在分别通入纯氧和甲烷混合反应之后,这种机器人可发生形变并且跳跃,最高可达到跳离地面300mm (30 倍身高),如图9(a)所示. 同样是以跳跃为运动形式,Bartlett 等[40] 应用三维打印技术制造了一种内燃驱动机器人. 该机器人也是以化学反应放能作为驱动机制,丁烷和氧气在一个三角状的密闭腔室里发生反应,使这个小型机器人跳跃,并且可以通过给底部的脚分别充气实现定向的跳跃,如图9(b) 所示. 内燃机器人具有驱动力大,运动幅度大的优势,但是存在着控制难度大的挑战.
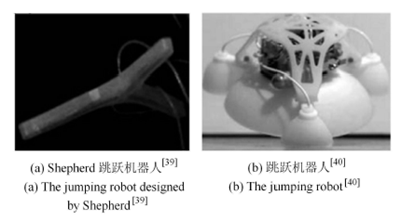
图9 内燃机器人
4.结构成型
软体机器人的制造包括了机器人本体结构制造、驱动材料制造、柔性电子电路制造. 文献[2, 61]总结了软体机器人的制造工艺,包括了形状沉积、纳米压印、激光消融、微注射成型、3D 打印等.图10 为形状沉积法(shape deposition manufacturing,SDM) 的流程示意图. Merz 等[62] 早在1994 年就详述了SDM 的具体实施步骤. 21 世纪初,MarkCutkosky 研究组最早将SDM 应用于机器人的结构制造[63]. 运用形状沉积法,可以把传感器、电路组件嵌入结构中,制作柔软的结构并使其具备多种功能.
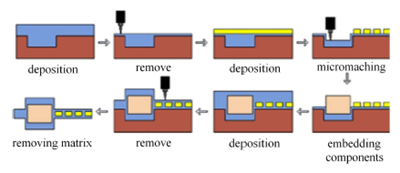
图10 SDM 工艺流程图
介电高弹体驱动器涉及的主要制造工艺包括聚合物薄膜的制作、薄膜的预拉伸、电极的集成和封装等. 如图11 所示,薄膜可用注模、旋涂、3D 打印制造或使用胶带(VHB, 3M),使用掩模、转印或溅射沉积法使电极均匀覆盖于薄膜两侧. 柔性电极的集成是DE 驱动器制造的关键步骤. 在可伸展电子系统中,结构发生变形如拉伸、扭转、折叠时,系统的电力和机械耗散应尽可能小. 这就要求电极有一定的柔顺度、良好的传导率甚至特定的外观. 使用柔性电极在介电高弹体表面制备具有特定形状的导电区域,可以实现通过二维平面制造对智能结构三维形状的驱动控制[64].
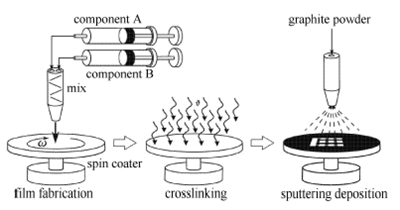
图11 DE 驱动器制造流程
Rosset 等[66] 综述了应用于DE 驱动器的柔性电极及其集成方法. 常用的柔性电极有石墨粉、碳膏、银纳米线等. Keplinger 等[67] 将水凝胶作为电极应用于DE 驱动器制造,制造的驱动器高度透明. 可运用于对外观有相关需求的地方.以Gorge M. Whitesides 为主发展的软刻蚀(softlithograph) 技术[68] 使用弹性模板为微图案的转移中介,包括了微接触印刷、近场光刻蚀、纳米压印等. 弹性模板是软刻蚀技术的核心元件,聚二甲基硅氧烷是优良的制备材料,其具有弹性优良和不与其他材料粘连的特点,能实现在曲面上制作图案. 文献[23]和文献[39] 中的软体机器人制造都采用了软刻蚀方法.
3D 打印(3D printing) 也可称为增材制造(additivemanufacturing, AM),具有数字制造、直接制造、快速制造等优点. 目前已经实现商品化的工艺主要有光固化打印、选择性激光烧结打印、熔融沉积打印.利用3D 打印已用于制造软体机器人的躯体[40;69-70].Rossiter 等[71] 采用喷射打印方式,利用UV 光逐层照射固化聚丙烯酸树脂得到一块厚度约90 1m 的可驱动的DE 薄膜. Carrico 等[72] 采用熔融沉积技术制造了IPMC 薄片(图12),并与商用IPMC 进行了性能比较. Peele 等[73] 采用光固化技术制造了一个气动模块.
5.关键技术与挑战
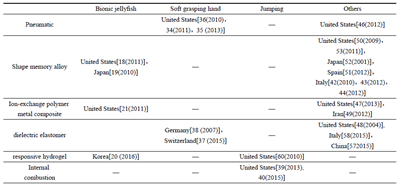
表1 和表2 从驱动方式、结构机理以及研发机构所在地的角度归纳了多种已有的软体机器人. 软体机器人的研究目前尚处于起步阶段,仍有很多难题需要去解决,包括能源供给、运动学建模、动作控制及通讯传感等. 首先,软体机器人具有极高的自由度,因此在建模与控制方面与传统的机器人有所不同,难以实现精确建模与控制. 目前,在软体机器人动力学建模中,主要通过结构功能分类进行多体离散化,通过将实验与模型验证,并充分考虑控制对步态的影响,从而优化机器人构造,提升性能[74-76]. 开
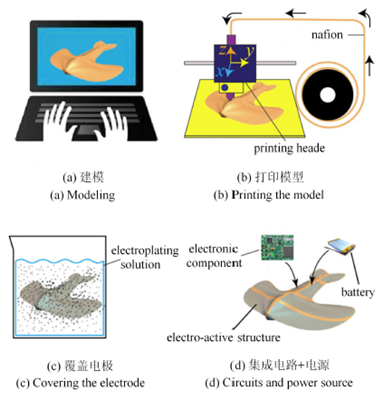
图12 熔融沉积技术制造IPMC[72]
发适用于软体机器人大变形、高自由度等特点的控制策略及建模方法对其基础研究及实际应用非常关键. 其次,软体机器人的进步在很大程度上依赖高性能的智能软材料制备及结构成型. 需要研发高能量密度、高效率、可大变形驱动、宽频率驱动并且易于成型的智能软材料. 最后,研究开发面向软体机器人应用的能源供应装置也是其发展的关键. 例如气动式软体机器人、电源以及气源的质量较大,影响了机器人的运动. 例如介电高弹体驱动的软体机器人,小型高压电源的可靠性至关重要. 软体机器人的电源要求延展性好、轻质、可携带.
表1 各类软体机器人按结构形式、驱动方式及研究国家统计表(I)
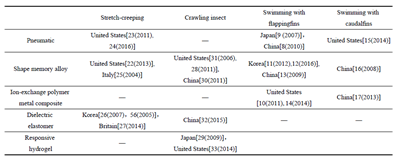
表2 各类软体机器人按结构形式、驱动方式及研究国家统计表(II)
6.展望
由于软体机器人要求通讯、控制电路等可以承受大变形,因而柔性电子的许多研究成果可以大量应用在软体机器人结构中,提升其性能. 而软体机器人的研究同时也对柔性电子技术提出了新的应用要求,并开拓了新的应用领域. 软体机器人因为其复杂的、软体化的结构特性,从而十分适合使用三维打印成型技术制备,同时也为三维打印成型技术提供了新的应用领域.
未来软体机器人的研究及应用,将利用到多个学科的前沿成果,以实现高柔软性、多功能化、高亲和度等性能特点;利用柔性电子、三维打印等结构与成型技术,使其易于制造,从而广泛应用于各类工程、医疗、军事等领域.
投稿箱:
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com
更多相关信息

