



基于智能交流接触器的采摘机器人机械臂设计
2017-7-20 来源:河南工业职业技术学院 作者:王臻卓,李伟,范乐
摘要: 在充分考虑机械臂伺服电机智能速度检测装置的结构和闭环运动过程控制的基础上,将智能交流接触器引入到了采摘机器人机械臂关节伺服电机的反馈控制中,并建立了 PID 闭环反馈调节回路,有效地提高了机械臂的控制精度。同时,将智能交流接触器以速度控制函数的形式嵌入到了 PID 控制环节,采用 ADMAS 和 Mat-Lab 软件对机械臂的轨迹控制精度进行了测试 ,并利用 Mat Lab 软件计算得到了关节的控制变量 ,以 Spline 形式将变量导入到了 ADMAS 中对机械臂两关节进行控制。通过仿真得到了机械臂关节的输入和输出位移随时间变化曲线和机械臂末端的运动结果,结果表明: 输入和输出的位移基本吻合,并且机械臂末端可以按照预定的圆环轨迹运动,从而验证了智能交流接触器 PID 控制的控制精度。
关键词: 采摘机器人; 机械臂; 交流接触器; 闭环运动
0.引言
目前,速度检测装置一般为速度传感器,且多为角速度传感器。线速度传感器由于其测量精度较低、检测范围小等因素未能得到广泛应用; 而应用较多的涡流位移传感器量程较小,结构复杂,无法在采摘机器人机械臂的关节伺服电机接触器上应用。充分考虑接触器的结构和闭环运动过程控制的影响,将智能交流接触器引入到了采摘机器人机械臂关节伺服电机的反馈控制中,该检测装置基于电磁感应原理,可以根据线圈中感应电动势大小计算出衔铁的运动速度; 而衔铁可以嵌入到机械臂材料中,实现了机械臂伺服电机的闭环反馈控制,对于微机电技术在采摘机器人中的应用具有重要的意义。
1.机械臂关节速度检测电路结构原理
为了实现采摘机器人机械臂关节伺服电机的速度自主检测,将电力电子技术应用到了电机的闭环反馈调节系统中,并利用电压控制模式及 Buck 电路实现交流接触器的智能控制,从而可以实现接触器的闭环控制,并快速、准确地调节线圈的电流大小。闭环反馈调节可以实现电压和电流闭环的快速切换,当机械臂关节伺服电机输出的电流小于设定电流阈值时,压闭环工作,接触器实现恒压工作; 当伺服电机输出的电压小于设定电压阈值时,电流闭环工作,接触器实现恒流工作。其工作原理如图 1 所示。
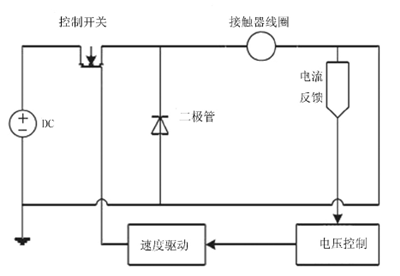
图 1 采摘机器人机械臂关节速度检测电路
采摘机器人的机械臂作为动磁体,主磁路的设计包含永磁体,其安放的位置和磁压降需要计算得到,磁路中的感应强度呈现线性变化,气隙磁感应强度基本恒定,其结构如图 2 所示。永磁体的磁压降变化会对磁链产生较大的影响,为了降低这种影响,将永磁体安装在静磁极上,这样永磁极产生的磁压基本恒定,而永磁体的等效磁动势和磁导率为
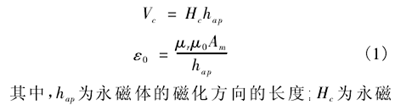
体磁感应的矫顽力; μr和 μ0分别为静磁体和永磁体的磁导率; Am为动磁极的横截面积。结合永磁体的等效磁动势和磁导率对检测装置进行了尺寸优化,主要包括动磁极的铁芯尺寸、静磁极的截面积、静磁极的铁芯长度、动静磁极的气隙长度和测量线圈的匝数。参数优化提高了速度检测装置的灵敏度和测量精度。
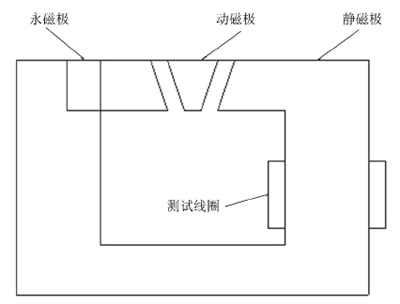
图 2 机械臂关节速度检测装置优化结构图
2.采摘机器人关节控制马达结构和原理
采摘机器人机械臂关节控制采用的是微机电技术,该技术采用微型伺服马达控制关节的运动速度。马达的内部包含一个速度检测器、小型直流马达、一组变速器、反馈调节电位和电子控制板,如图 3 所示。机械臂的原始动力由直流马达提供,可以产生较高扭力的输出,当齿轮组的变速比越大时,伺服马达可以输出的转矩也越大,承受的重力也越多,但是转动速度却越低。
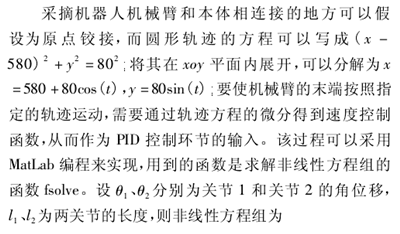
图 3 微型伺服马达内部结构图
微型伺服马达是典型的闭环反馈控制系统,其控制指令主要是由控制脉冲发出,其原理如图 4 所示。减速齿轮组由马达驱动,在终端安装有速度检测装置和电位器。速度检测装置检测的速度参数在电位器以比例电压或者比例电流的形式反馈给控制线路板; 控制线路板对输入控制脉冲信号进行比较,产生纠正脉冲,实现马达的正向和反向转动。通过反馈调节,可以使齿轮组的输出位置和预期的期望值相符,使纠正脉冲的值趋向于 0,实现了马达的准确定位。为了实现微伺服马达的线性控制,采用 PID 控制器,其结构如图 5 所示。
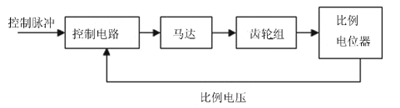
图 4 微型伺服马达工作原理图
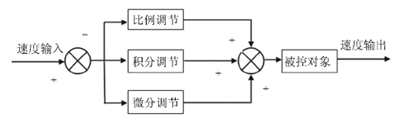
图 5 PID 控制器结构
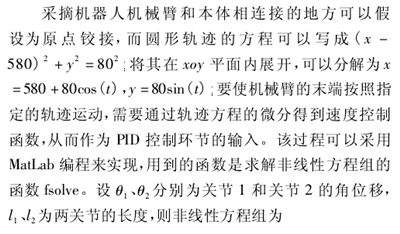
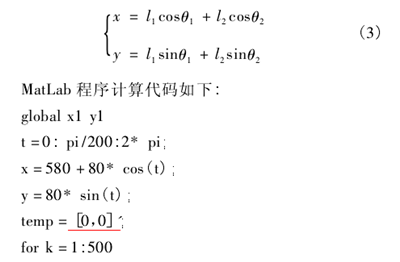
采摘机器人机械臂关节伺服电机闭环回路主要运用 PID 控制器进行调节,其控制方程为
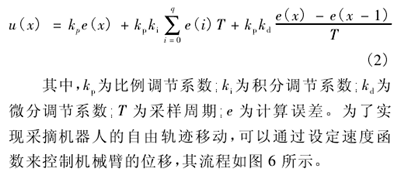
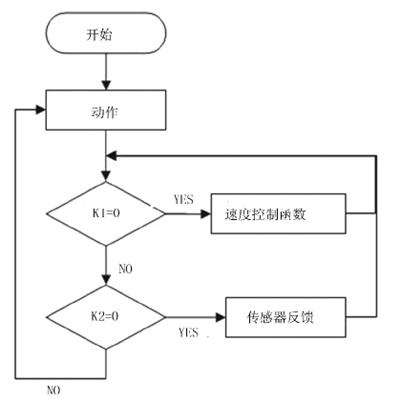
图 6 基于速度函数的机械臂轨迹控制
采摘机器人的机械臂动作主要由关节的伺服电机控制,而伺服电机不能直接控制机械臂的轨迹位移,因此只能将轨迹位移通过微分的方式转换为速度函数。当机器人的机械臂按照合理的速度移动时,系统返回值为 YES,机器人根据控制移动速度函数进行相应的动作; 当机器人的机械臂违背了合理的移动速度时,机械臂将结合传感器函数和速度来控制函数调整。
3.智能交流接触器动作轨迹规划测试
为了验证智能交流接触器对采摘机器人机械臂轨迹规划的作用,将速度检测装置作为机械臂动作控制的反馈调节装置,以 PID 控制器速度函数的形式引入到 PID 控制环境,并通过 ADAMS 仿真来验证轨迹控制的精度。为了简化测试过程,将采摘机器人在采摘果实和放回果盘的动作简化为近似圆环形的动作,在 ADAMS /View 中用 Contros Toolkits 建立控制系统,通过智能速度检测器速度控制函数的 PID 环节控制,控制机械臂每个关节的单分量力矩,使机械臂的末端运动轨迹为圆。
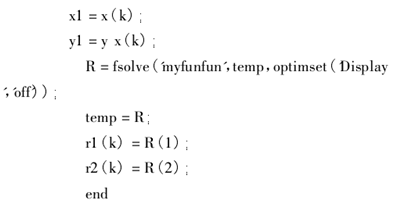
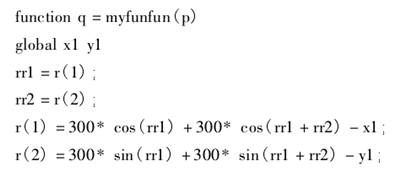
计算完成后,矩阵 r1 里面保存的是关节 1 的角速度,矩阵 r2 里面保存的是关节 2 的角速度,变量可以以 SPLINE 的形式输入到 ADAMS 中,作为模型的关节输入。使用 ADMAS 建立控制系统的步骤如下:1) 首先建立采摘机器人机械臂的模型,在机械臂的关节处分别添加智能交流接触器的速度函数,然后将其他数值初始化为 0。2) 将 Mat Lab 计算得到的数据导出,然后在 AD-MAS 软件中以 Spline 形式导入。建立一个 d1. txt 文档保存在 ADMAS 工作目录下,文档中的数据主要有两列组成: 第 1 列为时间,第 2 列为 r1 矩阵; 在 import中导入数据,然后点击 ok 后便可以导入 Mat Lab 计算得到的数据。在 PID 控制环节中设置各种参数后,单击 F8 可以进入后处理模块中,在后处理模块中可以将关节的输入和输出位移进行比较,根据位移的重合度,得到控制的误差,如图 7 所示。关节 1 输入和输出位置分布以 spline1_input 和 angl_joint1 表示。由图 7 可以看出: 采摘机器人机械臂关节 1 的位移输入和输出随时间变化的曲线非常吻合,从而验证了控制的精度。

图 7 关节 1 的位移调节曲线
关节 2 输入和输出位置分布以 spline2 _input 和angl_joint2 表示。为了进一步验证智能交流接触器速度函数的 PID 控制精度,对关节 2 的输入和输出位移进行了绘制,如图 8 所示。由图 8 可以看出: 关节 2 输入和输出的位移也非常吻合,从而进一步验证了智能交流接触器速度函数的 PID 控制精度。
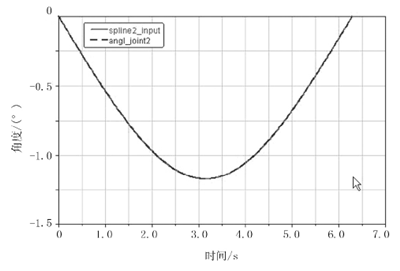
图 8 关节 2 的位移调节曲线
在 ADMAS 后处理中还可以对机械臂末端的轨迹进行查看,依次点击 Review→Create Trace Spline,选择关节 2 和关节 1 的端点,移动鼠标到 Joint1 处,右击在对话框选择 ground,单击 OK 便可以创建机械臂末端的轨迹,如图 9 所示。由图 9 可以看出: 机械臂末端可以严格地按照圆环进行运动。这说明,在 PID 控制中加入智能交流接触器的速度控制函数可以有效地实现采摘机器人机械臂的轨迹控制,并且轨迹控制的精度较高。

图 9 机械臂末端轨迹
4.结论
以交流接触器速度函数的形式控制机械臂的移动轨迹,建立了 PID 闭环反馈调节回路,有效地提高了机械臂的控制精度。为了验证该方法的可靠性,采用 ADMAS 和 Mat Lab 软件联合仿真的方法,对机械臂关节的输入和输出位移随时间变化曲线和机械臂末端的移动轨迹进行了计算。仿真结果表明输入和输出的位移基本吻合,从而验证了智能交流接触器在机械臂轨迹控制中应用的可行性。
投稿箱:
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com

