



SCARA 机器人运动学分析及 MATLAB 建模仿真
2017-3-20 来源:青岛大学自动化与电气工程学院 作者:左国栋 赵智勇 王冬青
摘要:利用 D-H 参数法对 SCARA 机器人进行建模,得到了机器人正运动学和逆运动学方程。 在 MATLAB RoboticsToolbox 的平台下,对机器人的简单运动进行了仿真,得到了各关节变量随时间变化的关系 ,直观反映出机器人各个关节的运动状态。 仿真结果表明,所建模型是合理有效的。
关键词:SCARA 机器人,D-H 参数法,轨迹规划,MATLAB 仿真
SCARA 平 面 关 节 机 器 人 是 目 前 使 用 最 广 泛 的 机 器 人 。SCARA 系统在 X、Y 方向上具有顺从性,而在 Z 轴方向具有良好的刚度[1],在装配作业中得到了广泛应用 ,因此有必要对 SCARA机器人进行研究。 轨迹规划在机器人学中占有极其重要的地位,任何作业的完成都离不开轨迹规划。本文将借助 MATLAB,利用D-H 参数法对 SCARA 机器人建模, 进一步进行机器人的轨迹规划
。
1 SCARA 机器人运动学分析
SCARA 机器人是一种平面关节型工业机器人,共有 3 个旋转关节(分别是 1、2 和 4 关节),其轴线相互平行,实现平面内定位和定向;另 1 个关节是移动关节(3 关节),实现末端执行器升降运动[2]。 如 图 1 建立各连杆之间的 D-H坐标系。
表1 SCARA 机器人D-H 参数表
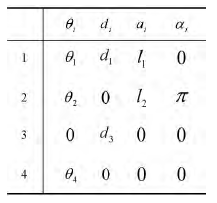
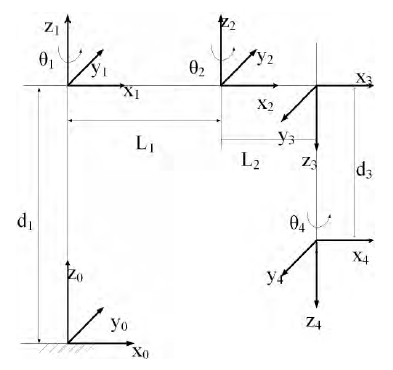
图1 SCARA 机器人D-H 参数坐标系
1.1 SCARA 正运动学
假设有一个构型已知的机器人, 即它的所有连杆长度和关节角度都是已知的, 那么计算机器人手的位姿就称为正运动学分析。 换言之,如果已知所有机器人关节变量,用正运动学方程就能计算任何一瞬间机器人的位姿[3]。
为了简化表达,令 c1=cos(θ1),c2=cos(θ2),c3=cos(θ3),s1=sin(θ1),s2=sin(θ2),s3=sin(θ3),s23=sin(θ2+θ3),c23=cos(θ2+θ3)。由 D-H 转换法则得,各坐标系转换矩阵分别为:
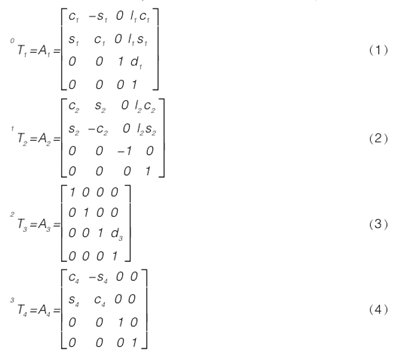
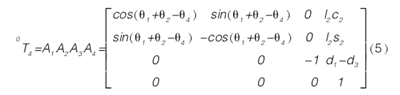
式(1)至式(4)矩阵相乘,得到如下机器人的基座和末端执行器之间的总变换:
1.2 SCARA 逆运动学
为了使机器人手臂处于期望的位姿, 要确定机器人的所有关节变量,就需要机器人的逆运动学解[3]。 令 SCARA 机 器人末端执行器期望位姿为:
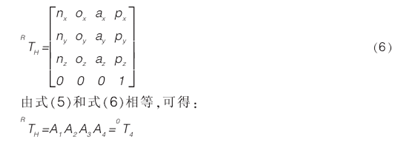

由式(8)两边矩阵对应元素(1,4)和(2,4)相等,得到:
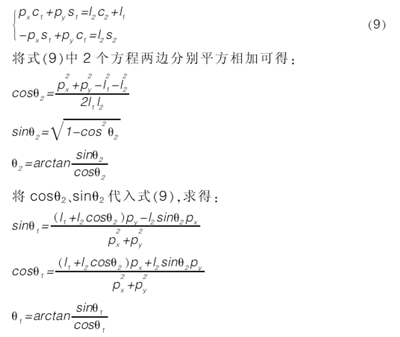

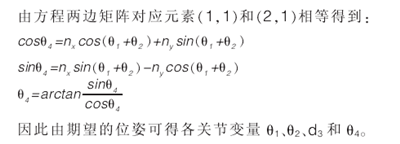
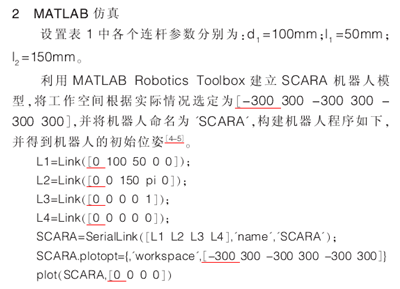
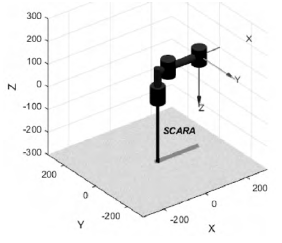
图2 SCARA 初始位姿
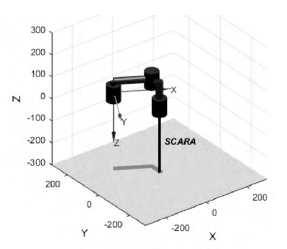
图3 SCARA 末位姿
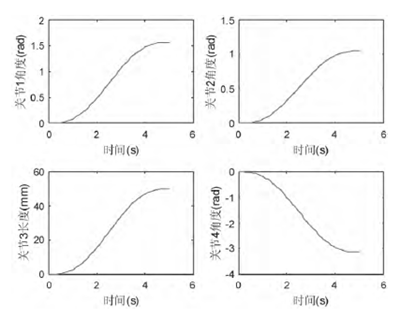
图4 各关节变量与时间的关系
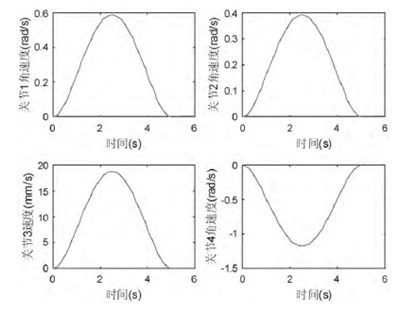
图5 各关节变量速度与时间的关系
假设机器人 5s 由初始位姿[0 0 0 0]移动到如图 3 的末位姿[pi / 2 pi / 3 50 -pi],在 MATLAB 平台下,得到的关节变量、变量速度、变量加速度随时间变化的图像[6]如图 4~图 6 所示。
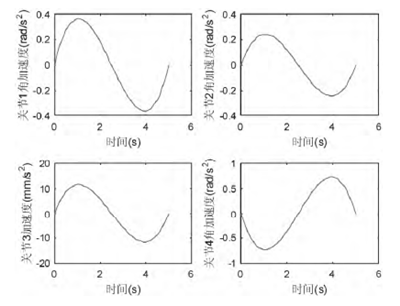
图6 各关节变量加速度与时间关系
3.结束语
对 SCARA 机 器 人 进 行 运 动 学 建 模 以 后 , 在 MATLABRobotics Toolbox 下,完成了对机器人运动轨迹的仿真 ,得 到了各关节变量、速度和加速度随时间变化的曲线图形,正确快速地再现了机器人运动过程。可以看出,MATLAB 为实现机器人轨迹规划提供了强大的仿真能力, 为机器人教学或科研提供了有力的平台。
投稿箱:
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com
更多相关信息

