
城市轨道精密三维测控新技术的研究与应用
2016-11-21 来源:宁波市轨道交通集团有限公司 作者:韩三琪
摘要:介绍城市轨道交通领域的轨道三维测控新技}I术,通过在地下控制测量中研究并应用自由测站三维|I边角测量新技术,实现控制点在施工与运营维护中的长久保存和使用,可显著提高地铁控制网的精度;在城市轨道交通中提出并应用轨道几何状态测量仪进行轨道精密测量,实现城市轨道测量的自动化与程序化,可}}提高轨道的初始平顺性;研究轨道基础控制网的测量与三维数据处理技术,并研发出自由测站三维边角网的数据采集与处理软件,可实现数据采集与处理的一体化,能够有效提高轨道测控的相对和绝对精度以及l平顺性,具有较好的推广应用价值。
关键词:城市轨道交通;轨道工程;精密测量;三维测控
1.技术概况
轨道是城市轨道交通行车的基础,其坚固的稳定性和良好的平顺性是列车安全舒适运行的保障。我国城市轨道交通线路正线普遍采用无砟轨道(混凝土整体道床)的结构形式。根据北京、上海和广州等城市轨道交通多年的运营经验,振动和噪声问题是伴随轨道交通运营对周围环境产生的不良影响,这与轨道的平顺性直接相关。
自20世纪90年代以来,随着国内轨道交通的迅速发展,整体道床轨道的施工工艺已形成较为完善的施工作业体系。然而,其施工测量方案还是基于20世纪90年代的轨道铺设工艺及精度要求,传统的城市轨道测量与控制方法主要采用小型机械、大量依靠人工,按照“布设导线、铺轨基标”的原则,由人工手持道尺、弦线等工具进行轨道测量,存在测量精度不高、人工误差影响因素多、劳动强度大、建设阶段的轨道测量控制基准在运营阶段不可持续利用、轨道平顺度不高、运营后轨道养护维修量较大等问题。
目前,全国地铁测量单位都在积极地探索和引进我国高铁精密工程测量技术,已有学者对高速铁路中的轨道控制网(CPⅢ)在城市轨道交通铺轨阶段的应用开展了相关研究。徐永刚研究并阐述了轨道精密测量技术在宁波市轨道交通建设中应用的可实施性_6 J。党红玲等介绍了将高铁精密工程测量中的cPⅢ测量与无砟轨道精调检测评估等技术引入广州地铁的建设与运营中的试验案例L_7|。孟峰等介绍了北京地铁6号线一期工程轨道铺设测量中利用CPⅢ控制网基本方法进行城市轨道交通轨道铺设测量试验的情况旧J。莫中生等介绍了沈阳地铁采用轨道基础控制网测量技术进行地铁铺轨的工程实例,并阐述了该技术与传统测量方法相比的优越性及实施中的注意事项19 J。笔者以正在运营的宁波轨道交通1号线一期工程为研究背景,介绍如何系统性地通过测量技术创新、工艺改进及设备更新,提高城市轨道测量的精度,实现城市轨道三维调整的设备化、精细化、信息化,有效提高城市轨道的相对精度、绝对精度以及平顺性。
2.城市轨道的精密三维测控技术
2.1 测量体系
轨道精密三维测控技术的主要内容是建立自由测站三维边角测量网、应用轨道几何状态测量仪进行轨道精密测量,从而指导轨道精调施工、轨道精密验收检测等。自由测站三维边角测量网可为调线调坡测量、设备安装测量、轨道的铺设、轨道的精调、沉降变形监测和运营维护等提供服务,在轨道工程施工前、施工中以及施工后的各个不同阶段提供统一的三维测量控制基准,并通过研究先进的仪器设备和技术手段进行三维的测量与控制,可使轨道的相对精度达到毫米级,实现轨道的高平顺性与高稳定性。新体系包括了一整套与目前轨道施工工艺配套的测量标准和技术规程,对今后轨道的设计、施工及运营提出相关的改进和优化建议。
2.2 自由测站三维边角交会测量网
自由测站三维边角交会测量网,是在城市轨道交通地面控制网(或经联系测量)、地下施工控制网的基础上按分级布设的原则进行布设的。通过研发专用的数据采集与处理软件系统,与智能型全站仪进行控制指令与数据的交换,实现了轨道控制网测量数据采集过程的自动一体化。通过研发专用的测量组件,实现了轨道基础控制点长期稳定保存。下面从控制点位布设、测量组件、测量方法及成果形式方面介绍该网。2.2.1控制点布设控制点按30~60 m的纵向间距,成对布设于线路两侧的隧道侧墙、中隔墙或站台廊檐上,高于轨面0.7~1.2 m。
考虑到隧道空间狭小、设备管线纷繁复杂,要满足长期保存、结构稳定、高度合适、便于建设与运营阶段测量的要求,在布设点位前,应与线路设计单位沟通,将控制点与应急平台、消防水管、电缆支架的设计位置进行综合设计;与机电设备安装单位进行沟通,在管网布设时,避开控制点。以圆形隧道为例,控制点布设位置如图l所示。
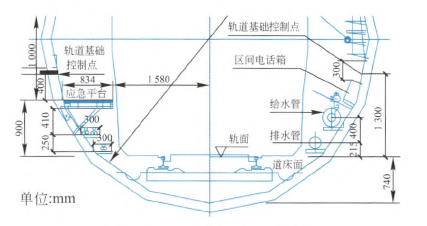
图1 单圆隧道控制点布置
2.2.2三维测量组件
城市轨道交通专用三维测量组件包括预埋件、棱镜杆及精密测量棱镜,棱镜杆用于连接精密测量棱镜与预埋件,在使用时安装上棱镜,再将其安装在预埋件中。该组件均由1Crl8Ni9不锈钢材料制作,标志重复安置精度和互换安装精度X、l,、Z的3方向分别小于0.4,0.4,0.2 mm。预埋件直接安放棱镜,属于强制对中,消除了棱镜的对中误差,也易于控制点的保护,可供建设和运营长期使用并保存。
2.2.3外业测量
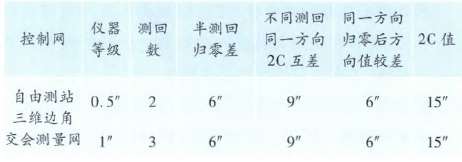
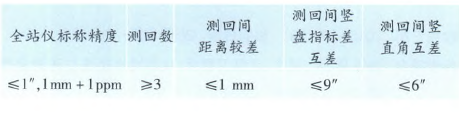
采用自由测站边角交会的方法测量,每个自由测站观测4对控制点,测站间重复观测3对控制点,每个控制点有4个自由测站的方向和距离,具体测量方法如图2所示,平面测量主要技术要求如表1所示。水平方向采用全圆方向观测法进行观测,水平方向观测应满足表2的要求。

图2 自由测站三维边角交会测量网
表1 测量方法与主要技术要求
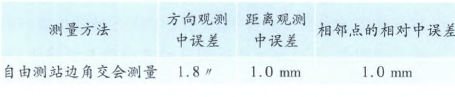
表2 7k平方向观测技术要求
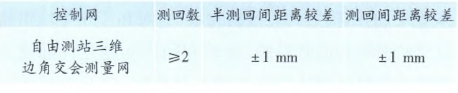
距离观测采用多测回距离观测法,应满足表3的要求。边长观测应实时地在全站仪中输入温度和气压进行气象元素改正,温度读数精确至0.2℃,气压读数精确至0.5 hPa。
表3 距离观测技术要求
高程采用自由测站三角高程测量方法进行高程测量,与平面测量同时进行。自由测站三角高程进行观测时,除满足平面网的外业观测要求外,还应满足表4的技术要求。
表4 高程外业观测主要技术要求
2.2.4与起算点的联测
1)与平面起算点的联测。当沿线布设有施工控制网(或贯通导线)时,应每隔300 m左右联测1个平面施工控制点。同时,应联测每个车站布设的地下平面起算点(经联系测量传递的控制点)。与平面起算点联测时,应至少通过2个或2个以上自由测站进行联测,如图3所示。
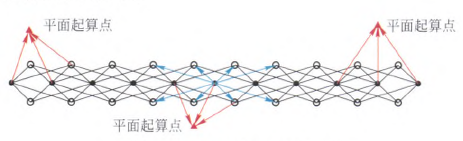
图3 与平面起算点联测示意
2)与高程起算点的联测。每隔1 km左右与水准基点进行高程联测。与水准基点的联测采用水准测量时,应按二等水准测量要求进行往返观测;与水准基点的联测采用三角高程测量时,应在水准基点上架设固定高度的棱镜,并在不同的3个自由测站对其进行观测。
2.2.5数据处理
进行三维数据处理时,先采用独立三维自由网平差,再采用合格的平面、高程起算点进行固定三维约束平差,以下为数据处理步骤。
1)解算三维概略坐标。是对所选择的平差文件进行概略坐标的推算,概略坐标的正确与否,将直接影响误差方程开列的正确性。
2)三维自由网平差。是对所选择的三维平差文件进行三维自由网平差,以检查观测数据的内符合精度及其与控制点已知坐标的兼容性。在自由网平差报告中,验后单位权中误差反映了观测数据的内符合精度,尺度K和控制点变换后较差反映了观测数据与控制点已知坐标的兼容性。当控制点变换后较差较大时,可在控制点坐标文件中将较差较大的控制点剔除,重新进行自由网平差。
3)三维约束平差。是对所选择的三维平差文件进行三维约束平差,并输出平差结果。三维约束平差结果包括:方向平差结果、斜距平差结果、天顶距平差结果、各测站大气折光系数、三维平差坐标及其精度、方位角、斜距、天顶距及其相对精度、三维控制网总体信息、方差分量估计结果。
4)搭接点平滑处理。是对相邻区段的重叠点进行平滑处理,形成全网统一坐标。
3.轨道三维精密测量与控制
长轨枕埋入式整体道床主要应用于我国轨道交通的一般减振要求地段,是城市轨道交通正线及辅助线一般地段采用的道床结构类型。以长轨枕埋入式整体道床为例,说明轨道三维精密测量与控制的方法,既有轨道施工工艺改进后的工艺流程见图4。
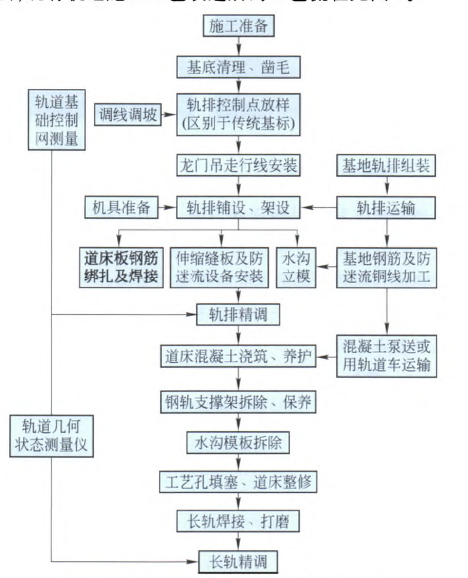
图4 轨道三维精密测量与控制施工流程
轨排精调采用全站仪自由设站配合轨道几何状态测量仪进行。将自由测站三维边角交会测量网测量成果坐标导入智能型全站仪中,并将线路平面、纵断面设计参数和曲线超高值等录入轨道几何状态测量仪。轨道检测利用自由测站三维边角交会测量网坐标成果进行全站仪自由设站(后方交会),确定全站仪的三维坐标,然后将轨道几何状态测量仪推动到待检测部位,通过全站仪观测轨道几何状态测量仪上的棱镜,实时显示当前轨道位置与设计位置的偏差,经过人工调轨,来精确控制轨道的实际位置与理论位置的绝对偏移量,以使轨排达到设计要求。轨道检测方法如图5所示,由轨道几何状态测量仪上配套的电脑实时显示待检测位置的设计与实测的偏差(见图6)。轨道精确测量与调整后,轨道的中心线、轨顶面高程允许偏差及轨道的平顺性指标均应满足规范要求,自检合格并报监理工程师验收后再浇筑道床混凝土。
4.轨道三维精密验收检测
轨道结构几何状态的好坏直接影响着轨道行车的安全性、平稳性和舒适性。衡量轨道的几何状态主要

图5 轨道三维精密测量与控制施工

图6 轨道偏差三维实时显示
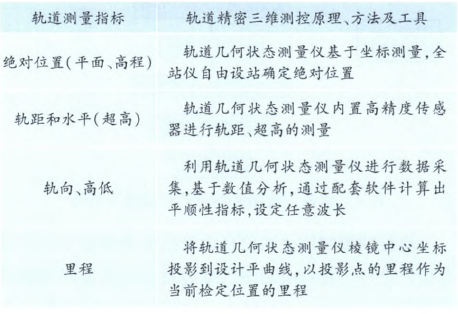
有绝对精度和相对精度两方面。轨道精密测量技术以自由测站三维边角交会测量网坐标为基准,通过轨道几何状态测量仪配合智能型全站仪来实现轨道的绝对位置与相对平顺性的检测。检测原理、方法及工具如表5所示。
表5轨道精密三维测控原理、方法及工具
5.结语
综上所述,轨道精密三维测控技术作为现代化城市轨道交通测量的一种新技术,有效提高了轨道的相对精度、绝对精度以及平顺性,实现了轨道测量的三维数字化,提升了轨道交通测量的自动化、程序化与机械化程度,具有较好的推广应用价值。为使这种技术具有更广泛的发展前景,工程技术人员应充分考虑各方面因素,进一步研究该技术在城市轨道交通运营阶段的沉降监测及轨道平顺性维护工作,使其贯穿于“设计一施工一运营”整个阶段,并发挥重要作用。
投稿箱:
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com
更多相关信息
- target=_blank>宝来轿车二次空气供给系统浅析
- target=_blank>RESOLUTE™绝对式光栅在直驱旋转工作台上的应用
- target=_blank>博世力士乐为秦川集团提供机器人关节减速器工业4.0交钥匙解决方案
- target=_blank>精镗汽轮机轴承箱大径孔
- target=_blank>船用螺旋桨叶片五轴联动砂带磨削方法研究

新闻资讯
| 更多
- target=_blank>MB2120B型数控内圆磨床电主轴变频器的改造
- target=_blank>【雷尼绍】RESOLUTE™与MELSERVO-J5强强组合,实现更快速、精确、可靠的运动控制
- target=_blank>NSK开发低摩擦轮毂单元轴承 可增加电动汽车续航里程
- target=_blank>T68卧式镗床进给系统的数字化改造
- target=_blank>AGV+协作机器人在零件数控机床加工上下料中的应用
- target=_blank>2020年7月高端装备制造业、工业机器人,行业运行简述
- target=_blank>浅谈线切割机床中走丝与慢走丝
- target=_blank>ANCA整体PCD铣刀 —— 提高生产效率带来新的发展机遇
- target=_blank>伊斯卡,不止专注于金属加工
- target=_blank>EMAG成功收购Scherer Feinbau(舍勒公司),极大扩展了公司产品范围以及客户群体

