
驱动力矩对汽车动力学特征的影响
2017-1-12 来源:东北林业大学交通学院 作者:王宪彬 施树明
摘要:为分析驱动力矩对汽车系统动力学特征的影响,以魔术公式为基础建立了引入驱动力矩的五自由度(纵向速度、侧向速度、横摆角速度、前轮角速度和后轮角速度)汽车系统平面运动的非线性动力学模型;以后轮驱动系统为例,通过多初值点的相空间分析、单初值点的时域分析及相应轮胎力的分布特征分析,探讨了前轮转角为0 时恒定驱动力矩对汽车动力学特征的影响;通过对恒定驱动力矩试验的进一步分析,计算了系统状态变量的分岔图.结果表明:在零转角条件下,随着驱动力矩数值的增大,五自由度汽车动力学系统将发生分岔现象;驱动力矩对汽车的动力学特征存在明显的影响.
关键词:地面车辆;动力学;驱动力矩;相空间分析;分岔分析
以二自由度汽车动力学模型为基础的汽车操纵稳定性研究已经取得了丰硕的成果[1].由于轮胎侧向力的非线性特征使汽车产生转向分岔的动力学失稳机理逐渐被理解和接受[25],而二自由度模型假设纵向速度不变,且不考虑轮胎纵向力对系统稳定性的影响[6],因此无法分析驱动力矩对汽车动力学特征的影响.但汽车在行驶过程中,纵向速度越大,轮胎所要提供的地面纵向驱动力越大.轮胎在不同驱动条件下能够提供的侧向力不同,仅以转向角作为分岔参数的转向分岔机理并不能完整解释汽车在驱动和转向联合工况下的动力学分岔特征,也无法解释驱动力矩对操纵稳定性的影响.
近年来广泛应用的汽车系统三自由度(纵向速度、侧向速度和横摆角速度)模型和汽车系统五自由度模型(纵向速度、侧向速度、横摆角速度和前、后车轮角速度)在一定程度上解释了驱动力矩对汽车动力学特征的影响.文献[79]分别利用非线性分析方法解释了纵向加速度对稳定性的影响.文献[1011]分别利用线性和非线性分析方法证明了前驱和后驱汽车的稳定性存在差别.这些研究虽然引入了纵向速度和纵向轮胎力,但驱动作用对汽车动力学特征的影响分析,尤其是前轮零转角输入条件下驱动力矩对汽车动力学特征的影响仍缺乏深入的研究.分析驱动力矩对汽车动力学特征的影响,将加深对汽车转向分岔机理的理解,为汽车动力学集成控制的工程应用提供理论依据.
为此,文中首先建立了引入驱动力矩的五自由度汽车系统平面运动的非线性动力学模型,然后以后轮驱动系统为例,分析了恒定驱动力矩对汽车动力学特征的影响,并计算了系统状态变量随驱动力矩变化的分岔图.
1.五自由度汽车系统模型
笔者以三自由度汽车转向系统模型[12]为基础,引入包含驱动力矩的车轮动力学方程,得到五自由度的汽车动力学系统方程[11]:
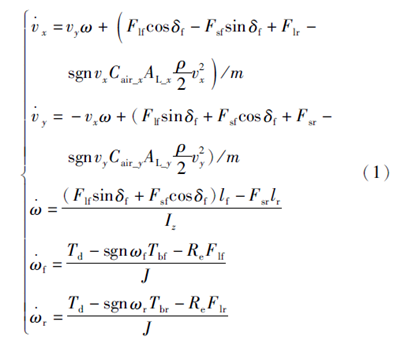
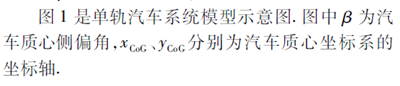
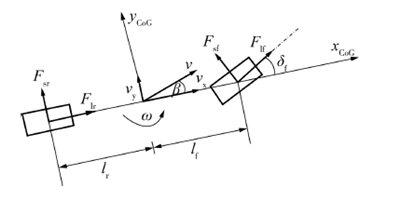
图1 汽车系统模型示意图
表1 前、后轮胎的纵向和侧向力参数
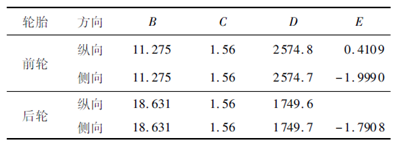
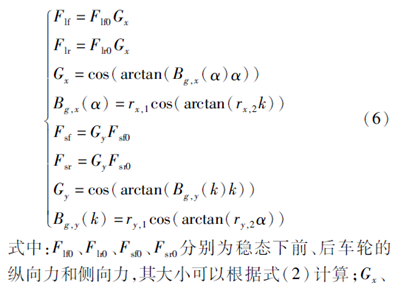
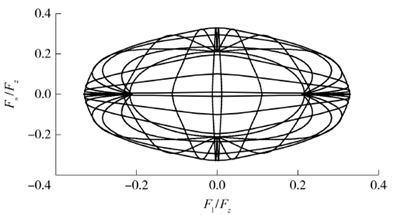
图2 轮胎力混合滑移特征
Gy为轮胎力混合滑移修正函数;rx,1 、rx,2、ry,1 、ry,2 为轮胎力混合滑移修正系数,文中分别取值为35、40、40、35.利用上述参数计算得到的轮胎力混合滑移特征如图2 所示.其中,Fs 和Fl 分别为混合滑移状态下的轮胎侧向力和纵向力,Fz 为轮胎的垂直载荷.
2.相空间分析
相空间特征是非线性动力学研究中重要的分析内容.不失一般性,文中选择后轮驱动系统进行分析,即前轮驱动力矩为0.前轮转角为0 、驱动力矩Td 取70 和140 Nm、纵向速度初值为40 m/s 时,后轮驱动系统多初值点的相空间轨迹如图3 所示,相空间轨迹在vyω平面上的投影如图4 所示.
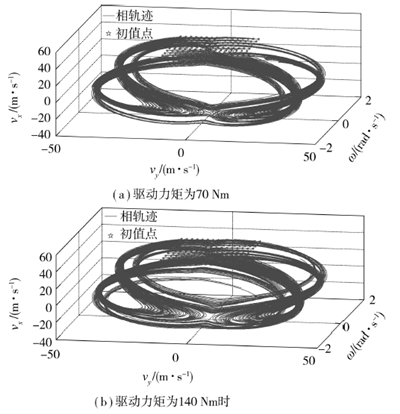
图3 不同驱动力矩下系统的相空间轨迹
由图3、4 可知:随着驱动力矩的增大,系统模型的相空间轨迹变得更加复杂;当驱动力矩由70 Nm增大到140 Nm 时,系统失稳后的最大横摆角速度ω(单位为rad /s)的变化范围由[-1.323,1.323]扩大到[-1.813,1.813],五自由度汽车动力学系统的相间轨迹在vyω平面上的投影中对应的稳定区域(吸引域)随着驱动力矩的增大而缩小.
3.时域分析
系统状态变量的时域响应是分析系统状态最直接的方法,为与相空间分析的结果进行对比,文中还进行了系统状态变量的时域分析.

图4 不同驱动力矩下系统的相空间轨迹在vyω平面上的投影
图5 为系统状态变量时间序列的数值计算结果,仿真条件如下:前轮转角为0,纵向速度初值为40 m/s,侧向速度初值为2 m/s,横摆角速度初值为0.17 rad /s,后轮驱动系统的驱动力矩分别为70 和140 Nm.
当驱动力矩Td =70 Nm 时,汽车系统的动力学状态很快稳定下来,即侧向速度和横摆角速度迅速收敛到0,纵向速度由于空气阻力大于驱动力矩而逐渐减小;当驱动力矩增加到140 Nm 时,汽车系统的动力学状态已不能稳定,即纵向速度、横摆角速度和侧向速度开始剧烈变化.这与相空间分析得到的结论一致.
仿真过程中车身姿态的变化(图中矩形有尖头的方向代表车头方向)如图6 所示.从图中可以看到,当驱动力矩Td =70 Nm 时,车身姿态稳定,当驱动力矩增加到140 Nm 时,车身姿态出现了旋转,此时汽车已经失稳.
在驱动力矩Td为70 、140 Nm 时,整个仿真过程中轮胎力的分布特征如图7 所示,图中纯滑移是相

图5 不同驱动力矩下系统状态变量的数值计算结果
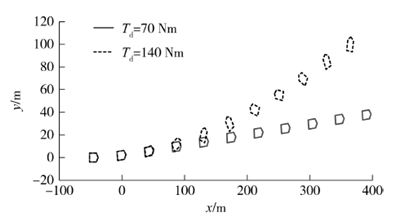
图6 车身姿态变化
对于混合滑移而言的,即代表不考虑混合滑移的稳态轮胎特性.
结合相空间分析和时域分析的结果可以看出:当驱动力矩Td =70Nm 时,汽车的动力学状态比较稳定,前轮和后轮的轮胎纵向力、侧向力都处于线性工作区域,混合滑移的纵向力较纯滑移的稳态轮胎力有所减小,但侧向力变化不明显;当驱动力矩增加到Td =140Nm 时,轮胎力由线性区域扩展到非线性区域.对比上述分析发现,当纵向速度初值为40 m/s、侧向速度vy =2 m/s、横摆角速度ω=0.17 rad /s、恒定驱动力矩Td =70 Nm 时,汽车系统仍能迅速稳定到侧向速度为0 和横摆角速度为0 的状态;随着驱


图7 不同驱动力矩下轮胎力的分布特征
动力矩由70 Nm 增加到140 Nm 时,汽车的行驶状态将失稳.由此可见,当驱动力矩为恒定值时,驱动力矩的大小将影响汽车的动力学特征
4.分岔分析
五自由度汽车系统的动力学方程本质上定义的是一个连续的微分系统.结合非线性系统的分岔定义[15],文中以驱动力矩为参数分析系统的分岔特征.
不同驱动力矩时vyω的相空间轨迹如图8 所示.仿真条件为:在前轮转角为0 的条件下,当纵向速度初值vx =40 m/s、vy =2 m/s、ω=0.17 rad /s 时,后轮驱动系统的驱动力矩Td(单位为Nm)的取值范围为[10,140],取值间隔为5 Nm.图8 中由同一初值点引入的不同相轨迹分别代表了不同驱动力矩对应的动力学状态.
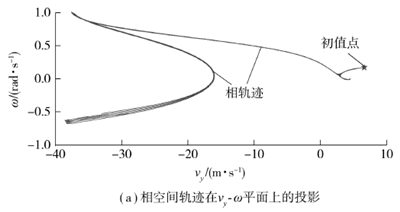
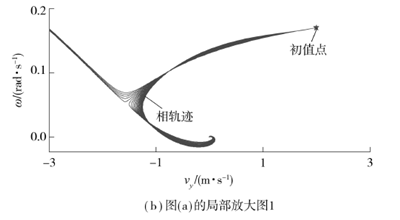

图8 驱动力矩在115 ~120 Nm 变化时系统的相空间轨迹在vy-ω平面上的投影
由图8 可知:随着驱动力矩的增加,系统的相轨迹连续变化,当驱动力矩由115 Nm 增加到120 Nm时,系统的相轨迹发生了明显的变化,此时状态变量的数值计算结果如图9 所示,此结果与相空间得到的结果一致.即当驱动力矩由115 Nm 增加到120Nm时,系统的解也同时发生了相应的变化.
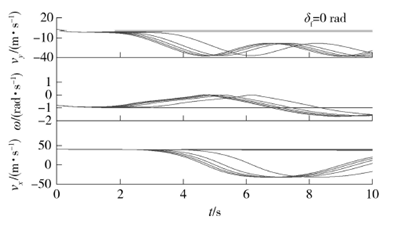
图9 驱动力矩在115 ~120 Nm 变化时系统的状态变量
减小驱动力矩的取值间隔,经计算发现,当驱动力矩由Td =119 Nm 增加到Td =120 Nm 时,系统相轨迹的拓扑结构发生突然变化,即分岔现象,如图10 所示.
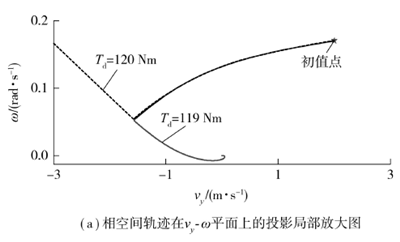
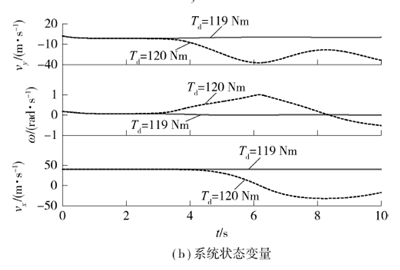
图10 驱动力矩在119 ~120 Nm 变化时系统的相空间轨迹及状态变量
给定汽车系统初值vx =40 m/s,vy =2 m/s,ω=0.17 rad /s,利用Matlab 求解五自由度汽车动力学系


图11 不同采样频率下汽车系统侧向速度、横摆角速度和纵向速度的分岔图
统方程,得到系统状态变量随时间的变化值.在一定的仿真时间内(总时长为200 s),略去开始2.5 s(1 个采样周期)的数据后,对状态变量按采样频率f=0.4 Hz进行采样.所有采样点的状态变量与驱动力矩在相应的变化范围内构成了汽车系统状态变量随驱动力矩增大的分岔图,如图11(a)所示.观察分岔图可知:当驱动力矩Td ≤119 Nm 时,侧向速度vy和横摆角速度ω均迅速稳定到0,而纵向速度vx 在驱动力矩较小时有所降低,随着驱动力矩的增大,纵向速度逐渐稳定增大到40 m/s;当驱动力矩Td >119 Nm时,系统的侧向速度、横摆角速度和纵向速度均开始剧烈变化,其相空间轨迹发生了突变.在上述相同仿真条件下,提高采样频率为5.0Hz,略去开始4 s(20 个采样周期)的数据后的分岔图如图11(b)所示.由图中可以看出,随着采样频率的提高,分岔图中的数据点越来越密集,但各个状态变量的动力学特征并没有发生本质上的变化,分岔时对应的驱动力矩仍为119 Nm.
5.结论
(1)相空间分析、时域分析和分岔分析的结果说明驱动力矩对汽车动力学特征存在明显的影响.
(2)在前轮零转角输入条件下,随着驱动力矩的增大,五自由度汽车动力学系统发生分岔现象,即驱动力矩可以作为汽车动力学系统的分岔参数.
(3)在今后的工作中可结合五自由度汽车动力学系统的平衡点求解继续深入分析驱动力矩对汽车动力学特征的影响.
投稿箱:
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com
更多相关信息
- target=_blank>大型曲轴转子一轴承系统振动特性理论与实验的研究
- target=_blank>基于专利信息的新能源汽车及驱动电机发展现状分析
- target=_blank>安森美半导体全面的IPM方案满足工业、汽车和消费应用的不同需求
- target=_blank>混合驱动自主潜航器续航能力分析
- target=_blank>电动汽车驱动工况下纵向冲击问题研究

新闻资讯
| 更多
- target=_blank>MB2120B型数控内圆磨床电主轴变频器的改造
- target=_blank>【雷尼绍】RESOLUTE™与MELSERVO-J5强强组合,实现更快速、精确、可靠的运动控制
- target=_blank>NSK开发低摩擦轮毂单元轴承 可增加电动汽车续航里程
- target=_blank>T68卧式镗床进给系统的数字化改造
- target=_blank>AGV+协作机器人在零件数控机床加工上下料中的应用
- target=_blank>2020年7月高端装备制造业、工业机器人,行业运行简述
- target=_blank>浅谈线切割机床中走丝与慢走丝
- target=_blank>ANCA整体PCD铣刀 —— 提高生产效率带来新的发展机遇
- target=_blank>伊斯卡,不止专注于金属加工
- target=_blank>EMAG成功收购Scherer Feinbau(舍勒公司),极大扩展了公司产品范围以及客户群体

