
兆瓦级风电机组被动式主轴制动器设计及分析
2017-3-17 来源:许继风电科技有限公司 作者:杨海锋,卢仁宝,王立飞,朱博峰
摘要:该文根据许继2MW风机制动器技术要求设计一款被动式主轴制动器,详细介绍其工作原理,并采用有限元分析对其主要部件的可靠性进行了验证,采用试验验证法对制动器制动性能进行了惯性试验分析,验证了其稳定性。
关键词:风力发电机组;主轴制动器;自动补偿;有限元分析
0.前言
在风力发电机组中制动器作为保证机组安全的终端执行部件,对风机的安全运行起着不可替代的作用。按照GL认证的相关内容,风机发电机组必须设计有两套独立的制动系统,分别为气动制动系统和机械制动系统。机械制动在工作中是一种减慢旋转负载的制动装置,按工作状态制动器又可分为被动式和主动式。主动式制动器只有在施加外力时才能改变其松闸状态,使其紧闸。与此相反,被动式制动器靠弹簧力的作用经常处于紧闸状态,运行时,需要再施加外力使制动器松闸[1-2]。
主动式制动器只有在施加外力时才能改变其松闸状态,使其紧闸。与此相反,被动式制动器靠弹簧力的作用经常处于紧闸状态,运行时,需要再施加外力使制动器松闸。为保证安全制动,风机机组一般选被动式制动器[3]。
本文根据许继2MW风机制动器技术要求设计一款被动式主轴制动器,详细介绍其工作原理,并采用有限元分析对其主要部件的可靠性进行了验证,采用试验验证法对制动器制动性能进行了惯性试验分析,验证了其稳定性。
1.制动器工作原理
被动式制动器是一种被动式制动器,采用的是弹簧制动,液压释放。由预压缩弹簧贮存的弹簧力作用于活塞,活塞在弹簧力的作用下推出,并推动摩擦衬垫压向被制动体实现减速或制动功能。如图1所示,被动式制动器主要由主动钳部件1和从动钳部件2两大部分连接而成。
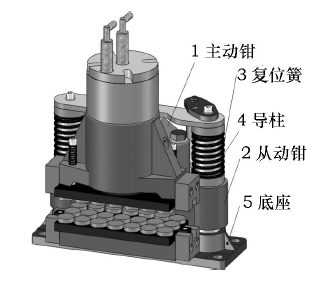
图1 制动器结构图
被动式制动器设计带有一个制动衬垫调整主复位和辅助复位系统,如图2所示,辅助复位系统由底座5、导柱4及复位弹簧3组成。
当液压动力源起动并输出压力油时,主动钳中的活塞6在液压力的作用下压缩弹簧缩回。主动钳1上的摩擦衬垫9在衬垫随位弹簧8的作用下与被制动体(制动盘)实现单边脱离。在脱离的同时,从动钳2在复位弹簧3的作用下离开被制动体完成制动器的打开(松闸)。当液压动力源停止供压或控制电磁阀打开时,主动钳内的活塞6在预压缩制动弹簧7的作用下迅速推出,作用在摩擦衬垫9上并将摩擦衬垫压向被制动体。由于从动钳通过连接螺栓与主动钳连接成为了一体,在主动钳接触到制动盘后,从动钳通过导柱4的导向作用与活塞作相向运动并带动从动钳的摩擦衬垫压向被制动体完成制动(抱闸)。
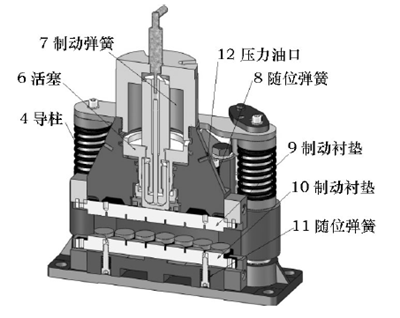
图2 制动器结构图
此款制动器具有间隙自动补偿功能,能够自动补偿主动侧、被动侧摩擦片磨损所增大的的间隙,主动侧的自动补偿由主动制动钳内部的多线螺纹机构实现,被动侧的自动补偿功能由定位系统实现。这种设计可以保证在制动衬垫的整个使用寿命内,制动器总能保证相同的气隙(制动盘和摩擦片的间距)和相同的夹紧力。
1.1 自动补偿工作原理
制动时,活塞在碟簧力的作用下,推动补偿螺栓、调节轴、套筒和摩擦环向左移动,在额定退距下,摩擦环、垫、前挡盖贴紧,同时套筒将摩擦片与制动盘压紧产生制动力。
当制动过程中,摩擦片的磨损厚度超出摩擦环轴向变形,套筒需继续向左移动,受前挡盖阻挡摩擦环不能移动,此时套筒轴向力大于摩擦环径向弹力产生的摩擦阻力继续向左移动,直至将摩擦片与制动盘压紧产生制动力。由于摩擦环具有径向弹力,可以在轴向力小于摩擦阻力时,重新定位在套筒上。
通压松闸时,液压力克服碟簧力,使活塞带动补偿螺栓、调节轴、套筒和摩擦环向右移动,达到额定退距(前挡盖和摩擦环减去垫后的间隙)时,摩擦环贴紧主机体不能移动,由于补偿螺栓与调节轴的特殊螺纹配合,此时调节轴旋转,套筒不再移动(保证额定退距),补偿螺栓继续向右移动,直至活塞达到设定位置,补偿动作执行完毕,其补偿结构图如图3所示。
1.2 定位系统工作原理
定位系统安装于空心轴端盖上如图4所示。定位系统的内部结构如图5所示,主要包括定位缸体、安装于定位缸体内部的轴承、定位轴、定位销以及各部分的螺母、螺钉等。定位缸体由螺栓安装于空心轴的端盖上,定位销下部开有长圆形的通孔,由穿过通孔的定位销安装于被动支架上。
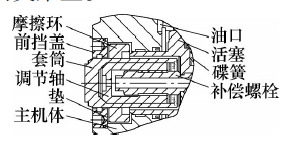
图3 自动补偿结构图
图4 定位系统的位置
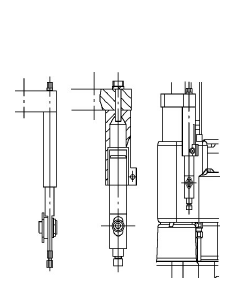
图5 定位系统的组成
定位装置的工作原理如下:定位销与定位轴之间预先调整好一定的间隙,该间隙就是制动盘与摩擦片之间的单侧间隙值,调整好后,将定位缸体锁紧。当制动开始后,被动制动钳带动定位销向制动盘方向移动单侧间隙值,如果摩擦片没有磨损,则移动到摩擦片贴紧制动盘为止,松闸时再退回相应的距离。
当被动侧的制动衬垫磨损量为δ时,被动制动钳同定位销一起向制动盘移动单侧间隙值之后,继续移动δ值的距离,同时定位轴在定位缸体内部也相对移动δ距离,本次制动结束后,制动器松闸时,被动制动钳与定位销一起远离制动盘,移动的距离为单侧间隙值,而由于磨损产生的δ距离,由于定位轴在定位缸体内被锁紧,被动制动钳无法恢复原来的状态。因此此时制动盘与摩擦片的距离仍然为原来的单侧间隙值。
2.有限元分析
采用有限元的方法对该制动器进行了强度分析,载荷及边界条件是:约束制动器与齿轮箱的安装面,施加制动力17kN,制动器与刹车盘之间的摩擦系数为0.4[4]。采用workbench自带的网格分割器对模型进行网格划分,划分后的节点数为87 587,单元数为48 963[5]。制动器壳体采用球墨铸铁,钳体采用钢。图6和图7分别为制动器的等效应力云图和位移云图,可见制动器整体应力较小,最大应力小于材料的屈服极限;位移结果表明制动器不会发生大的变形,这说明制动器在工作的时候依然能保持较好的稳定性。
图6 制动支架等效应力云图
图7 制动支架等效应变云图
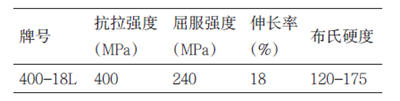
制动器制动支架及底座材料选用QT-400-18L,即低温型球墨铸铁材料,能够满足制动器在低温环境下使用的要求。制动器钳体材料选用QT-400-18L,材料性能如表1。
表1 铸件材料性能表
分析结果如表2:
表2 铸件受力分析结果
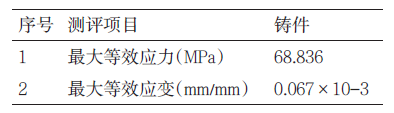
取制动器使用系数为3.3 × 68.836=206.6MPa<240MPa,因此该材料满足制动器使用条件。
3.制动器制动性能测试报告
动态试验的目的是检查在模拟工况下制动器的制动性能,确保制动器动态性能的稳定性,验证制动器动态性能符合设计要求。转子制动器属于惯性制动器,其动态试验应该在惯性试验台上进行。
惯性实验台可以进行动态制动力矩、动态摩擦系数、制动衬垫磨损率、制动时间、制动功等参数的测定,并可以出具动态制动力矩-时间曲线、摩擦系数-时间曲线、转速-时间曲线等多种组合曲线[6]。
3.1 制动器制动性能试验条件
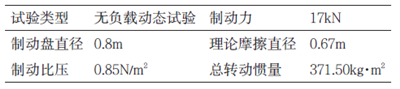
为了对此款制动器的制动性能进行全面测试,选用风电制动器转动惯量制动器进行相关测试[7]。根据许继2MW风电机组的技术要求设定测试参数如表3。
表3 惯性试验参数
3.2 试验过程及结果
转速500转,共制动10次进行跑合,动态摩擦系数最大值为0.429,动态摩擦系数最小值为0.327,平均动态摩擦系数为0.4078。根据测试结果制动器抱闸时间、制动时间、制动器力矩均满足设计要求。
4.总结
(1)根据许继2MW风机的技术要求设计一款被动式主轴制动器,此款制动器具有自动补偿功能,提高了制动器的稳定性,并大大减少了风机制动器维护强度,保证风力发电机组的安全运行。
(2)通过有限元分析对制动器主要部件的强度进行了分析,验证此款制动器能够满足风电发电机组对制动器强度要求。通过惯性试验,对制动器的制动性能进行了全面测试,试验结果表明此款制动器具有动作快、制动稳定的特点。
投稿箱:
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com
更多相关信息
- target=_blank> 大连中远船务4号极地冰区模块运输船顺利试航
- target=_blank> 大宇造船将获34亿美元新援助方案
- target=_blank>温暖之源 驱动之力
- target=_blank> 赵熙伟:竞争力来自每一细节 精益求精
- target=_blank>北奔重汽“北斗导航系统车载终端及车辆智能安全管理服务平台开发项目”再次顺利通过自治区科技成果鉴定

新闻资讯
| 更多
- target=_blank>MB2120B型数控内圆磨床电主轴变频器的改造
- target=_blank>【雷尼绍】RESOLUTE™与MELSERVO-J5强强组合,实现更快速、精确、可靠的运动控制
- target=_blank>NSK开发低摩擦轮毂单元轴承 可增加电动汽车续航里程
- target=_blank>T68卧式镗床进给系统的数字化改造
- target=_blank>AGV+协作机器人在零件数控机床加工上下料中的应用
- target=_blank>2020年7月高端装备制造业、工业机器人,行业运行简述
- target=_blank>浅谈线切割机床中走丝与慢走丝
- target=_blank>ANCA整体PCD铣刀 —— 提高生产效率带来新的发展机遇
- target=_blank>伊斯卡,不止专注于金属加工
- target=_blank>EMAG成功收购Scherer Feinbau(舍勒公司),极大扩展了公司产品范围以及客户群体

