0 前言
五轴数控加工技术近年来被广泛的应用于民用工业和军事工业产品的加工。由于同传统三轴加工相比增加了两个附加的自由度,五轴加工能够获得更高的生产效率和更好的加工质量,因此成为了数控领域研究的重点。
五轴加工中的刀具路径规划问题一直是能否实现高效的自由曲面加工的关键。目前,在实际生产中应用较多的刀具路径规划方法还是比较基本的等参数线加工方法和等截面线加工方法[1],由于上述方法均为按事先给定的方向确定加工路径,加工表面残余高度误差的分布不均匀,为保证最大残余高度误差而使走刀行距过于保守,加工效率偏低。因此提高加工效率,充分发挥五轴数控加工设备的性能是亟待解决的问题[2]。
为了产生高效合理的刀具路径,国内外学者提出了多种不同的方法,并且在应用中取得了一定的成效。国外学者如RAO 等提出Principal axis 方法, PI 等提出Grind-free 方法,LIN 等发展出误差自适应生成算法;周艳红、周云飞、高军和杨勇生等国内学者也在这个方面进行了深入和细致的研究,提出了不同的五轴刀具轨迹生成算法并得到了实际应用。大部分现有的方法采用类似的处理过程,从曲面的一条边界作为初始路径,通过一定的算法得到偏置的后续路径。本文采用了一种新的方法,通过计算曲面各处的有效加工域的宽度和最优域加工方向,搜索得到曲面上一条优化的初始化路径,并且构建了一种迭代算法生成相邻的刀具路径。最终生成的(近似)最优路径具有最大的切削宽度和最短的刀具路径总长度。
1 有效加工域参数计算
数控加工成形过程就是刀具沿着预定的刀具路径对工件毛坯进行切削加工,最终形成工件外形的过程。切削过程中刀具通过扫掠在被加工表面形成了一个加工区域,此加工的部分区域与理想加工面的误差小于或等于预定的加工精度要求,而其余部分区域则不符合加工精度要求。本文将符合加工精度要求的那部分加工区域定义为有效加工域。可见,要将工件表面加工成形,必须满足有效加工域完全覆盖被加工面这一要求。
有效加工域的两个最重要的特征参数是域宽度和域切削方向。域宽度表征有效加工域覆盖区域的大小,域切削方向表征了产生的刀具路径的流向,直接影响域宽度值。两者都会对最终产生的刀具路径质量产生重大的影响,因此是本文描述的重点。有效加工域参数计算的目标就是得到具有最大域宽度的刀具路径及其流向。有效加工域的形成涉及到加工表面与加工刀具的相互作用,对其研究必然牵涉到对被加工表面的几何特征和刀具的几何特征的描述问题。对于工件被加工面的描述已经有了统一的数学表达,因此主要讨论刀具的几何描述问题。
1.1 刀具的统一参数表达
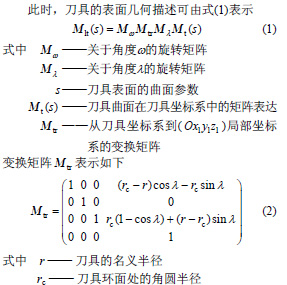
为了使得分析过程不局限于某种特殊形状的刀具,需要寻求一种刀具的通用表达形式,使其可以用于各种加工刀具。由于NC 加工中刀具的旋转速度相对进给速度来说要快的多,所以可以用一系列相连的直线或曲线的回转面来表示刀具的几何形状,所以本文采用了如图1 所示的通用刀具统一参 数表达[3]。
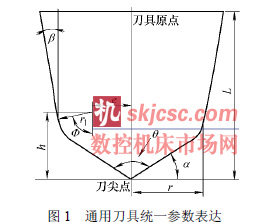
部分、中间的圆环部分和下面的圆锥部分。其中参数r 表示刀具的名义半径,h 表示倒角圆的圆心到刀尖的垂直距离,L 表示刀具的轴向长度,e 表示倒角圆的圆心到刀轴的径向距离。其他的四个角度参数α,β,θ,φ分别如图1 标示。改变各变量的取值便可以得到各常用刀具模型。如圆环铣刀可以表示为一种α =β = 0,e = r – r1 的通用刀具。由刀具的统一参数表达可以建立了刀具的几何描述矩阵Mt [3],本文不再赘述。
1.2 有效加工域宽度和域切削方向
有效加工域宽度是影响生成的刀具路径质量最重要的因素。其值大小与刀具在工件表面切削时的姿态有关。为方便描述刀具在加工面上的运动姿态,在刀具与工件表面的接触点A 处引入一个局部坐标系(Oxl yl zl ),如图2 所示。
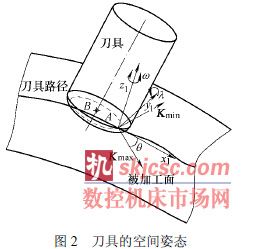
图 2 中点B 为刀具中心位置点,xl 轴的方向为A 处的瞬时切削方向,zl 轴的方向为A 的曲面外法线方向,yl 轴的方向由xl 轴和zl 轴通过右手螺旋法则确定。λ定义为刀具绕yl 轴的倾角,ω 定义为刀具绕zl 轴的摆转角[4]。kmax 表示被加工面A 处最大主曲率方向单位矢量,kmin 表示A 处的最小主曲率方向单位矢量。
在加工中,每个时刻刀具扫描体外形与被加工面的相互作用生成了此刻的刀具有效扫描体外形,从而最终决定了切削产生的几何形貌。瞬时的刀具有效扫描体外形上的任意一点P 必须满足条件:P点处刀具扫描体外形曲面外法线矢量必须与的此时的刀具运动向量相垂直。当刀具有效扫描体外形确定后,通过计算刀具有效扫描体外形上的点与工件表面的距离,就可以确定有效加工域的宽度b。设刀具有效扫描体外形上的存在两个位置点P1、P2,这两点与被加工曲面的距离等于预定的加工公差要求τ,则有效加工域宽度的定义如下
即有效加工域宽度可以表示如下:刀具有效扫描体外形上与被加工曲面的距离等于τ的两点,此两者之间的距离在垂直于切削方向(矢量Yl方向)上的投影长度。
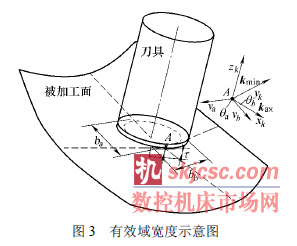
为了得到最大的域宽度值,加工时应当让刀具调整姿态在无干涉的条件下尽可能的匹配被加工表面的几何形貌。因此域宽b 是一个关于刀具几何描述Mlt (s)和公差τ的函数。同时还应注意到,在曲面的某处,不同的切削方向得到的有效加工域宽度是不同的。如图3 所示,在被加工曲面的某处P,刀具沿着θa 方向切削时相对应的有效域宽度为ba,沿着θb 方向切削时对应的有效域宽度为bb,此时两者刀具的空间姿态Mlt (s)和预定的公差τ都相同,但得到的有效域宽度不同。
现在引入一个新的局部坐标系( Ox y z κ κ κ ) ,xκ轴的方向为A处的曲面最大主曲率方向( max κ 方向), yκ 轴的方向为曲面最小主曲率方向( min κ 方向),zκ轴的方向为P 点处的外法线方向。定义瞬时切削方向和xκ 轴的夹角为切削方向角θ。综上所述,b 也是关于切削方向角θ的函数。即b =W(Mlt (s), θ , τ ) =W(Mt (s), λ , ω, θ , τ ) (4)通常,当切削方向与最小主曲率方向相同或非常接近时,可以取到最大的有效域宽度[5-6]。
为减少计算量,本方法以一定间隔均匀分布的曲面参数u,v 采样该处的优化有效域宽度和切削方向角,得到一个离散的优化域宽度和切削方向角的曲面分布。对于未采样的曲面区域,可以通过相邻的四个采样点的数值插值计算出未采样点的域宽度和方向角数值。从这个意思上说,有效加工域规划方法是一种近似最优的刀具路径生成算法。
2 刀具路径的搜索迭代生成
传统的刀具路径生成算法一般都从曲面的某一条边界开始计算生成刀具路径。这种方法虽然方便了计算过程,但不能保证由此边界产生的刀具路径即是最优的。有效加工域规划法采用搜索算法得到整个曲面上一条最优的初始刀具路径,通常情况下这条初始路径不是曲面的边界;然后通过迭代算法生成其余的偏置路径,最终使得生成的路径完全覆盖整个曲面。
2.1 最优初始路径的搜索确定
通过上面所述的方法我们得到了被加工曲面上均匀分布的有效加工域,以及每个加工域的域宽度和切削方向角的集合。成为初始刀具路径的要求是此路径通过的有效加工域应该具有最大的平均有效域宽度。搜索曲面四个边界上的有效加工域,参考每个有效加工域的切削方向角确定下一个有效加工域,连接这两个有效加工域作为刀具路径的一部分,重复此过程直到遇到处于曲面边界上的有效加工域停止。这样便生成了一系列的刀具路径,因为每条路径都是沿着各个离散加工域的最佳切削方向生成的,因此这些路径上的每一个有效加工域都取到了本域的最大域宽度。这些路径称为候选初始路径。然后从这一系列候选初始路径中选出具有最大平均域宽度的一条路径做为初始路径。设有N 个离散的有效加工域位于某段候选初始路径上,此路径的平均域宽度bav 定义为
式中bi —— 编号 i 的路径的最大域宽度值计算出每条候选路径的平均域宽度值 bav,取bav 最大值的路径作为初始路径。
2.2 后续刀具路径的迭代生成
确定了最佳初始路径后,便可以通过迭代算法生成相邻的路径。迭代算法通过一条已知的刀具路径生成相邻的一条路径,然后利用刚生成的路径重复算法过程产生下一条路径,如此往复循环直到所有的有效加工域都被路径覆盖。下面具体介绍迭代算法的具体实现。
引入一个新的参数 f,f 表示当前路径的实际平均域宽度与初始路径的平均域宽度bav_max 的比值,称为刀具路径的质量系数,即
式(7)说明要取的路径TPi+1 上的对应点Pi+1, j 与当前Pi, j 的连线方向与有效域宽度的方向相同,即在yl轴方向上。设加工曲面的参数表达为S(u,v),计算保证最大域宽度条件下的Pi+1, j 坐标必须满足
在实际加工时,刀具的空间姿态和被加工曲面的几何特性在每个不同的A 处都不同,因此具有不同的有效加工域宽度和切削方向角。这意味着两条相邻的刀具路径通常不会是相互平行的[7]。为了防止生成的相邻的刀具路径间存在没有被刀具路径覆盖的间隙,还需对刀具路径进行校验和调整,使之满足下面两个要求。
(1) 相邻两条刀具路径的边界线没有交点。
(2) 相邻两条刀具路径至少在曲面某一处重合。
条件(1)保证了两条相邻路径的边界或者是每处都互相有一部分重叠,或者是没有任何一处重叠。条件(2)保证了两条相邻路径必定有一处重合,即排除了条件一中完全不重叠的情况。这就保证了相邻的刀具路径都相互重叠一部分,路径间不存在间隙。通过上述方法,以路径TPi 为基础生成路径TPi+1,然后以路径TPi+1 为基础生成路径TPi+2,整个刀具路径生成的过程就是上述方法的迭代过程。
随着迭代过程的进行,通常情况下所生成刀具路径的质量系数将逐渐减小,为了保证得到高效的刀具路径,必须对产生的刀具路径的质量系数进行一定的限制,否则迭代的后期可能产生大量的质量不佳的刀具路径。本文采取的方法是预先设定质量系数的下限fmin,当检测到当前生成的刀具路径的质量系数低于fmin 时,则停止本次迭代过程。然后在未加工区域中重复上述的搜索迭代算法,得到新的初始路径,以初始路径为基础进行新的一轮迭代运算。如此往复,直到被加工表面上的所有有效加工域都被刀具路径覆盖时结束算法运行。
3 算法的实现及应用示例
3.1 算法实现流程
在微机上以上述算法为基础,采用Matlab 和Visual C++环境编写程序实现算法过程。算法程序流程如图4 所示。
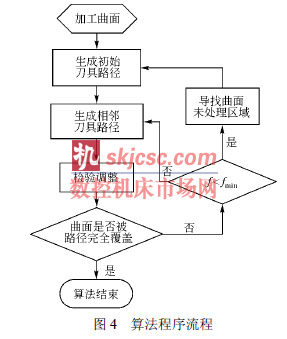
程序以已知的被加工曲面作为输入,以最终的优化刀具路径集作为输出,并且可以根据用户需要改变刀具路径质量系数的下限值以及有效加工域在曲面上的分布密度。
3.2 应用示例
选取热压塑模具曲面的一部分作为示例被加工面,在xyz'a'c 型的五轴数控机床环境下采用环形刀具进行切削加工。刀具的名义半径r = 8 mm,圆环角圆半径r1 =1.5 mm。刀具的两个锥度角α = β = 0o,加工预定公差τ= 0.05 mm。为了方便比较,将刀具倾角λ和ω 设置为固定值,λ= 10o,ω=3o,刀具路径最小质量系数设为fmin = 0.75。
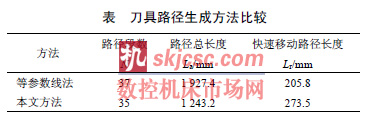
采用传统的等参数线法和本文提出的有效加工域规划法分别生成相应的刀具路径,下表是两种方法的结果对比。
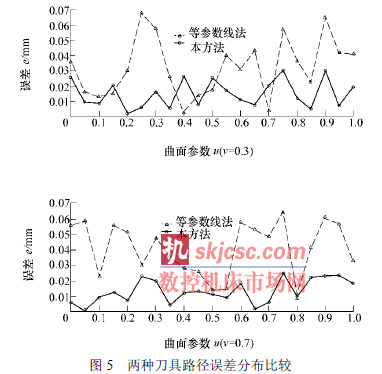
采用上述两种方法生成的刀具路径在VERICUT 下进行曲面误差分布模型数据分析,图5显示了两种刀具路径误差分布比较。
上述对比结果可以看出,有效加工域规划方法生成的刀具路径数目和总长度都减少了,尤其是路径总长度减少了35.5%,与等参数线法相比较,采用有效加工域规划法可以得到更短的刀具路径总长度以及加工质量更高的加工表面。不足的是快速移动路径的长度反而加大了,作者认为这是由于等参数线法采用之字型走刀方式,因此刀具快速移动的距离比较短,而有效加工域规划法没有对路径的进退刀点进行优化,这一不足也是今后对本方法进一步完善的重要方向。
4 结论
(1) 提出了一种新的五轴数控加工刀具路径生成方法——有效加工域规划法。这种方法根据刀具的几何特征和空间姿态结合曲面的几何特性,构造曲面上的有效加工域集合,计算得到(近似)最优的域宽度和切削方向角参数。同时构造了一种搜索迭代算法,用于得到初始路径和相邻的后续路径。
(2) 应用示例显示有效加工域规划法相对于传统的五轴刀具路径生成算法具有较明显的优势,同样的加工条件下可以得到总长度更短的刀具路径和更短的加工时间,并且能得到更高的加工精度。
(3) 应用过程中也发现了本方法的一些不足,如刀具路径质量系数的选择依靠主观判断,不参与切削的刀具路径(如快速移动路径)没有得到足够的优化等,需要进一步的改进完善。
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com