0 引言
数控机床由于可以根据输入代码自动完成对复杂共建轮廓的加工,越来越受到制造行业的重视。但是,机床在部件设计到装配过程中,加工和装配工艺等原因,造成机床本身存在误差,导致加工零件轮廓与设计轮廓存在较大误差。近年来,随着加工件精度要求不断提高,对机床的加工精度也提出了更高的要求,误差补偿技术在提高机床精度方面起了重要的作用[1,2]。
对于三轴机床,存在21项几何误差[3]。每个运动轴存在3个方向的平移误差、绕3个轴的旋转角度误差以及3个运动轴间的垂直度误差。在这些误差中,对机床精度影响最显著的因素是移动轴在其运动方向的位置精度。
1 位置精度产生原因及评价
影响机床运动轴运动方向的位置误差主要有反向间隙和螺距误差[4,5]。
反向间隙: 丝杠和螺母之间存在一定的间隙,当正转变为反转时,在一定的角度内,尽管丝杠转动,螺母需要在间隙消除后才能带动工作台运动,这个间隙成为反向间隙。反向间隙的存在会影响到机床的定位精度和重复定位精度,从而影响机床的性能。因此,为了得到良好的动态运动特性,必须对其加以补偿。
螺距误差:机床的滚珠丝杠的制造存在误差,丝杠的螺距制造完成时并不是完全均匀的,在机床的使用过程中, 经常加工某特殊外形的零件也会导致丝杠磨损不均匀,造成螺距的不均匀,由丝杠螺距造成的误差称为螺距误差。螺距误差对机床的定位精度会产生很大影响,当温度变化时,丝杠的热变形也会造成螺距误差的变化,因此,对螺距误差的补偿是非常必要的。
关于定位精度与重复定位精度的评定方法,我国在《机床检验通则》第二部分“数控轴线的定位精度和重复定位精度的确定(GB/T 17421.2-2000)”中给出了通过直线测量机床的单独轴线来检验和评定数控机床的定位精度和重复定位精度的方法。
位置偏差Xij, 为运动部件到达的实际位置Pij与目标位置Pi之差:Xij=Pij-Pi。式中,Pi为运动部件要达到的位置,Pij为运动部件第j次向第i个目标位置趋近时实际测得的到达位置。
某一位置的单项平均位置偏差Xi↑或Xi↓:
上式表示由n次单向趋近某一位置Pi所得的位置偏差的算术平均值。某一位置的反向偏差Bi可以表示为:
Bi=Xi↑-Xi↓%
即从两个方向趋近某一位置时两单向平均位置偏差之差。轴线反相偏差为沿轴线或绕轴线的各个目标位置的反向偏差的绝对值Bi中的最大值:B=max[ Bi ]。
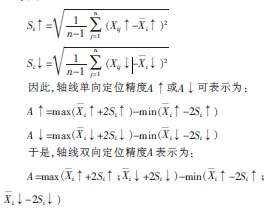
在某一位置的单向定位标准不确定度的估算值Si↑或Si↓:
2 位置误差测量原理
测量机床定位精度的仪器一般采用激光干涉仪。
Renishaw的XL-80激光干涉仪主要由以下部件组成:XL-80激光头,XC-80环境补偿器及其传感器, 直线、角度测量光学组件,XL-XC USB电缆组件,三脚架,以及LaserXLTM软件。
激光干涉仪对测试环境有较严格的要求, 测试时,要求环境最好处于恒温中,测试前需开机运行机床半小时左右,使机床各部件达到热稳定,各进给轴处于较好润滑效果,尽量避免空气流动和润滑不均造成测试精度的降低。
激光干涉仪的安装光路为激光头—分光镜—反射镜, 在测试过程中要确保激光干涉仪的光路与运动轴的轴线相平行,这是激光干涉仪调光的基本准则。在调试时可选择先调试反射镜或分光镜, 其目的是保证被反射的光返回到激光头的接收孔内, 然后再放上分光镜或反射镜,使干涉光返回到激光干涉仪的接收孔内,若激光干涉仪稳定亮起三盏以上的绿灯,则调光结束。两列相互干涉的光, 当其中的一列光波向相对于另外一列光波移动时, 在相干光的某处相干涉的明暗条纹间产生移动, 且明暗条纹出现的次数是两列光相对移动的距离除以波长的二分之一的整数倍。激光通过分光镜,光束一分为二,一束射向一个固定反射镜形成参考路径, 另一束射向可移动的反射镜形成测量距径。这二反射镜所反射的光,回到分光镜内重新会合, 合并成一道光束并产生干涉条纹射至光电传感器, 传感器感测出这些条纹的明暗变化,经由信号处理电路加以处理,即能计算出移动反射镜所移动的距离。
3 定位误差补偿实验及结果
数控系统一般自身带有螺距误差补偿和反向间隙补偿功能。用RenishawXL-80 激光干涉仪对机床的定位精度与重复定位精度进行检测, 根据检测结果对其反向间隙和螺距误差进行补偿。测量时,根据“机床检测通则”, 对每一进给轴, 每米至少选择5个目标位置点,并且在全程上至少也有5个目标位置。对本机床测量时, X、Y轴行程均为600mm,测量间距取等距20mm,而Z轴因其行程较短, 只有300mm, 测量间距取等距10mm, 使得三进给轴均满足目标位置点每米多于5个的要求。根据公式,可以求得误差补偿值。在补偿过程中,对于轴线双向定位精度的补偿方法,只需要补偿各点的位置误差,不需要补偿反向间隙;对于轴线单向定位精度补偿的方法,位置误差和反向间隙均需要补偿。根据激光干涉仪对机床的测量结果, 将所得的各轴反向间隙写入数控系统,并使反向间隙有效,将丝杠的分段的螺距误差生成数控加工补偿程序写入数控系统,即可完成反向间隙与螺距误差的补偿工作。
补偿前,X轴定位精度测量结果: 均偏差范围M, 16.830;系统偏差E,17.260;单向重复R↑,5.127;单向重复R↓,4.548; 反向差值B,1.240; 定位精度A↑,20.367;定位精度A↓,20.452;定位精度A,21.073。补偿前,Y轴定位精度测量结果: 均偏差范围M, 24.650;系统偏差E,24.900;单向重复R↑,1.222;单向重复R↓,1.514; 反向差值B,0.500; 定位精度A↑,25.229;定位精度A↓,25.778;定位精度A,25.778。由于采用了滚珠丝杠和电机丝杠直接连接,反向间隙在补偿前已经具有很高的精度,其偏差值较小,电机经联轴器直接与丝杠相连接的安装方式具有较小的反向间隙。经实验验证,反向间隙补偿效果不显著,甚至会产生微小上浮量,因此在本机床只对螺距误差进行补偿。补偿后,X轴定位精度测量结果: 均偏差范围M, 1.900;系统偏差E,2.600;单向重复R↑,2.663;单向重复R↓,1.665;反向差值B,1.433;定位精度A↑,3.456;定位精度A↓,3.194;定位精度A,4.005。补偿后,Y轴定位精度测量结果: 均偏差范围M, 4.933;系统偏差E,5.400;单向重复R↑,0.924;单向重调度指令,调度权可暂时下移至大集控中心,由大集控负责在此时间段内管理设备操作,操作完毕调度权收回调度部门管理,对于简单事故异常处理(如某变电站电压互感器高压保险熔断、无重要用户的系统单相接地等)也可参照此方案执行。
(7)从调度端优化电网操作进程。
充分考虑电网操作的安全性、可靠性、经济性,减少运行操作人员的劳动强度。
(8)规范预调度指令操作程序,为运行人员提前布局准备创造条件。
将调度任务进行逐步分解,经优化后,下达到执行子站,保证操作的顺利进行。对于即将交接班的操作、调度和运行操作,交班方均应为接班方准备操作票,以保证交接班期间操作的连续性和安全性。
(9)对重要变电站及短时间内不具备撤人的站点可先实行减人值班,逐渐过度为无人值班集控模式。
5 结语
变电站大集控模式是电网快速发展的必然产物。虽然这一新兴模式在国内开展时间不长, 在运行过程中也遇到了一些困难,但是只要各级人员层层把关,立足现实,从细微角度入手,这些问题还是能够克服的。
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com