
基于工业机器人的数控加工控制系统设计
摘要: 通过研究制造生产线数控加工单元和上下料系统,并分析数控机床和工业机器人工作原理和生产流程,设计一种基于 Modbus/TCP 协议的数控机床加工单元控制系统。该系统采用 S7-1200 PLC 作为主站,通过以太网通信实现对工业机器人和数控机床协同控制。通过实际工程验证,该系统具有通信稳定、响应速度快和工作效率高等特点。
关键词: 数控机床; 智能制造; Modbus/TCP; 工业机器人
0 前言
随着中国制造 2025 战略的提出,提高装备制造智能化水平已经成为制造业发展的趋势,加工制造单元是智能制造的主要环节,其智能化程度对企业生产效率具有重要影响。为提高数控加工的智能化和信息化水平,设计基于 Modbus/TCP 协议的工业机器人自动上下料系统,将数控机床、工业机器人、数据信息采集管控等加工制造设备集成为智能制造系统。通过工程验证,系统通信稳定、工作效率高,该系统在加工制造环节的应用对提高制造企业的智能制造水平具有重要意义。
1、系统硬件结构设计
基于工业机器人的数控加工控制系统采用西门子S7-1200 系列 PLC 作为系统的中央控制器,型号为CPU1214C,PLC 集成 PROFINET 接口用于编程以及设备间通信,支持开放的以太网协议与第三方设备通信,通过工业交换机实现与机器人、数控机床等设备通信。计算机用于控制器 S7-1200 PLC 的编程和工业机器人的编程调试,通过工业交换机将程序下载到 PLC 和工业机器人控制器,系统硬件结构如图 1所示,系统网络拓扑如图 2 所示。
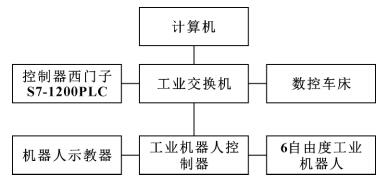
图 1 统硬件结构

图2 系统网络拓扑图
2 、系统网络通信设计
Modbus/TCP 是运行在 TCP /IP 上的 Modbus 报文传输协议,通过此协议,控制器相互之间通过网络和其他设备进行通信。控制器 S7-1200 PLC 与工业机器人李群 QKM 间采用 Modbus/TCP 通信协议,Modbus/TCP 协议是标准的网络通信协议,利用控制器上的 PN 接口与工业机器人进行通信。
2. 1 控制器 PLC Modbus/TCP 协议
在 S7-1200 PLC 编程软件 TIA Portal V15 中调用Modbus/TCP 的库指令 “MB _ CLIENT” 和 “MB SERVER”, “MB_SERVER”指令作为 Modbus/TCP服务器通过控制器 S7-1200PLC 的 PROFINET 连接通信,使用该指令,无需其他任何硬件模块。S7-1200PLC Modbus/TCP 通信程序如图 3 所示,“MB_SERVER”指令将 处 理 Modbus/TCP 客 户 端 的 连 接 请 求、接收 Modbus 功能的请求并发送响应; 通过 “MB_CLIENT”指令,在客户端和服务器之间建立连接、发送请求、接收响应并控制 Modbus/TCP 服务器连接终端。
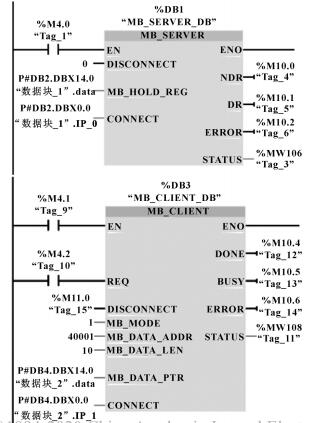
图3 S7-1200 PLC Modbus/TCP 通信程序
2. 2 控制器 PLC 与机器人通信
S7-1200 PLC 为系统的主控制器,用来接收上位机控制信息并进行分析,然后将控制指令发送给执行设备。控制器 S7-1200 PLC 与数控机床的通信通过硬件 I/O 方式来实现机床上下料数据交互。为提高信号抗干扰能力,在 PLC 信号输出端增加光电隔离模块。机器人与 PLC 数据交互的主要地址分配如表 1所示。
表 1 机器人与 PLC 数据交互主要地址分配
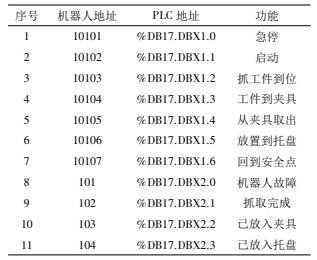
机器人与控制器 PLC 交互的目的主要是接 收PLC 发来的动作控制命令,执行相应示教动作任务,并将自身运行状态信息返回至 PLC,保证整个系统正常运行,控制流程如图 4 所示。工业机器人反馈给主控制器 PLC 的信息主要包括对各指令的响应和系统状态信息的反馈,同时还包括机器人自身的运行状态,如空间坐标、工作模式等信息 。
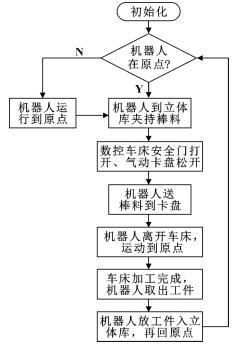
图4 系统控制流程
2. 3 机器人与数控机床通信
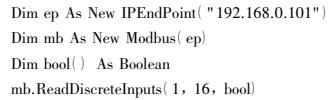
采用李群自动化六轴工业机器人,型号为 QKMHL6; 数控机床安全门、夹具和加工状态以布尔量存放在指定寄存器中,机器人从 Modbus 设备上读取多个寄存器的值; 通过判断不同寄存器的布尔量,完成设定 的 动 作 轨 迹; 数 控 机 床 端 IP 地 址 配 置 为192. 168. 0. 101,机器人端数据通信程序如下。
3、 机器人运动轨迹规划
为了提高自动上下料工业机器人的工作效率和精度,根据机器人运动路径和末端位置姿态,通过调整运动轨迹平滑参数,在两条直线路径中规划一段过渡路径。由于机器人在数控车床上下料中的运动主要是直线路径,在相邻的 2 个路径上确定出过渡点,采用线性轨迹圆弧过渡。直线路径采用圆弧过渡算法简单且通过编程易于实现,该指令必须在两段运动指令间执行。系统设计的效果图与实物图如图 5 所示。
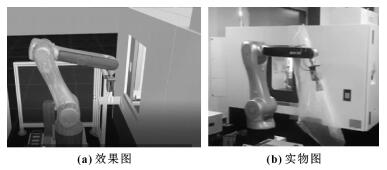
图 5 系统设计效果图与实物图
根据机器人放置工件需要,机器人末端夹具需要垂直到达起始位置 P1,位置 P1 到位置 P2 采用直线轨迹如图 6 所示运动轨迹,从位置 P1 水平运动到目标位置 P2 垂直 50 cm 处,再垂直运动 50 cm 到达目标位置,通过设置机械下一个运动距离与当前运动距离重叠 50%,机器人实际运动的轨迹如图 7 所示。
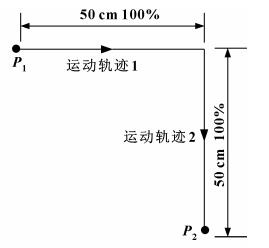
图 6 直线运动轨迹
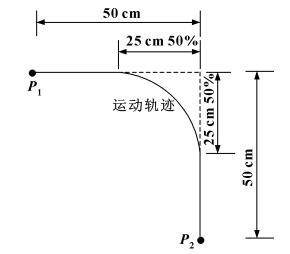
图7 圆弧过渡直线轨迹
起始位置 P1 到目标位置 P2 之间采用机器人Move. ForceOverlap 指令,实现下一个运动距离与目标距离重叠百分数,程序 Move. ForceOverlap ( 0,50)实现 2 个距离重叠 50% 。
4 、结论
数控加工单元是智能制造的重要组成部分,为了提高制造加工单元的自动化程度和工作效率,设计了基于工业机器人的数控加工制造控制系统。该系统通过协同控制工业机器人和数控机床,实现了机床的自动上下料工作,通过实际工程验证了控制系统的可靠性,数控加工效率和安全性得到了提高。
作者:庞党锋1,2,宋亚杰2,王春光2,刘彦磊2,李传军2
来源:1. 天津职业技术师范大学信息传感与智能控制重点实验室
2. 天津中德应用技术大学机械工程学院
投稿箱:
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com
更多相关信息
- target=_blank>高进给刀具的加工应用
- target=_blank>NUM系统星三角转换功能在数控机床中的应用
- target=_blank>NC程序与PLC数据交换功能应用
- target=_blank>CIMT2021部分五轴加工中心浅析
- target=_blank>基于三菱和西门子数控系统平台对圆锥轴承磨削参数固化的应用
名企推荐







