



不确定机器臂系统的鲁棒追踪控制设计
2016-10-13 来源:常州大学 作者:陈岚萍,马正华,薛国新
摘要:针对机器臂的不确定动力学参数和外部未知干扰,提出了一种自适应雅格比追踪控制策略,运用李亚普诺夫方法及滑模控制来加强系统的渐进稳定性,可使机器臂末端装置的运动误差渐进收敛到零。仿真结果表明,该控制器运用于二自由度机器臂具有较好的鲁棒性和动态性能。
关键词:鲁棒性;雅各比追踪控制;滑模控制;机器臂控制;不确定性
1.引言
关于机器人的研究课题已越来越多地受到关注,但由于大量的动态耦合,如不同关节之间、未知干扰以及时变参数等,越来越需要具有鲁棒性f、自适应性、快速收敛和结构简单的控制策略。
目前研究人员已开发设计了一些不确定系统控制器,例如自适应控制¨1、滑模控制旧J、被动控制旧1及李亚普诺夫稳定性控制H1等,这些控制器需要补偿这些结构不确定参数和有界干扰。其控制策略易局限于设定点控制或未知有界常数控制,因此,不确定系统的控制器设计仍然是一个很大的挑战。本文针对机器人轨迹追踪,提出了一种运用视觉信息作为反馈信号的目标空间自适应雅格比(Jacobian)控制策略。这种白适应鲁棒控制策略设计不是依赖于未知有界参数的先验知识,而依赖于在线估计未知矢量,在每一时刻,控制输入可以补偿存在的未知参数。使用这种反转动态和滑模控制理论可加强闭环稳定性,改善动态性能,如末端装置运动的追踪误差或快速收敛性。仿真结果表明了该控制策略的有效性。
2.问题描述
机器臂期望的末端装置的位置定义在任务空间,取X∈Rn为任务空间矢量,依据参考文献[5]可描述为

考虑如外部干扰和参数变动等系统不确定项,系统动力学模型方程(4)可描述为
具有乃个广义坐标的n输入n输出二阶非线性仿射系统的动力学模型可描述为
考虑不确定性,n自由度机械系统形式为
则所有包含非建模动态和其它未知外部干扰的不确定项可统一描述为
将式(8)代入式(7)得
比较式(5)和式(9),则
3.自适应鲁棒控制器设计
追踪控制问题可通过保持系统轨迹在滑模面S=O[71上得到解决,滑模面可取为
其中,S(t)为n×l维矢量;A为n×n维对角正
由式(10)知

考虑非线性不确定动态系统,如式(7)所示,若鲁棒控制率取为

其中,K为需要设计的对角正定常数矩阵;F定义为预测干扰;则具有模型及干扰不确定性的机器臂系统可获得渐进鲁棒稳定性。
取Lyapunov函数


则Lyapunov函数微分可表示为

设计自适应率为

则式(15)可转换为
若满足设计的控制率和自适应更新率;则y关于.s负定;即任意非零初始值的轨迹误差将渐进收敛于滑模面S=0,从而保证机器臂系统鲁棒稳定性。
4.仿真实例
以图1所示2自由度机器臂系统方程为例仿真。
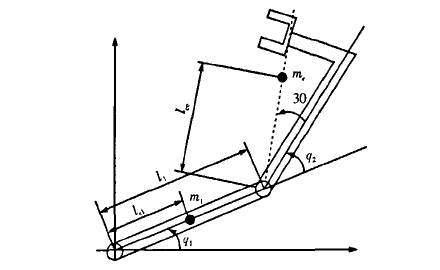
图1 2自由度串联机器臂机构图
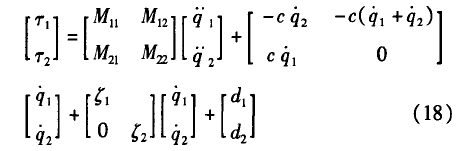
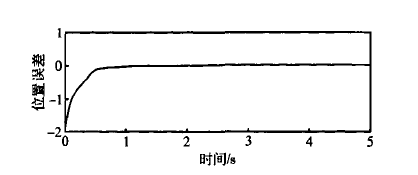
图2关节1的位置追踪误差
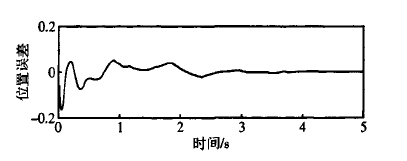
图3关节2的位置追踪误差

图4机器臂末端装置的追踪误差
仿真结果表明,尽管所有的不确定性包括机器臂动力学及外部干扰,但机器臂追踪误差能较快收敛到零。证明了本文提出的自适应控制策略追踪误差较小及误差较快收敛到零,具有较好的有效性。
5.结论
本文提出的控制方案综合了Jacobian自适应控制、滑模控制和反转动态控制,基于Lyapunov稳定性分析表明机器臂系统渐进稳定。仿真结果也证实了尽管机器臂系统引进了包括变化的动态参数和未知干扰等不确定项,但本文提出的控制器具有较好的鲁棒追踪性能,使提出的控制策略动态地修正控制子空间及目标,使其收敛到实际值。
投稿箱:
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com
更多相关信息

