



AGV+协作机器人在零件数控机床加工上下料中的应用
2020-9-30 来源: 北京发那科机电有限公司 作者: 郭树伽 刘羽 姜彬 王志涛 陈鑫
随着我国汽车工业的快速发展,数控加工制造技术正朝着敏捷柔性生产线方向发展。目前在西方发达工业国家,由数控车床、C N C加工中心和工业机器人组成的柔性生产系统已经是主流产品。柔性生产线中采用机加工自动化进行工件上下料,简化了数控车床加工中心的结构,使生产线布局变得紧凑,增强了物料传输系统的柔性。
现状概述
常见的机床自动化上下料的形式,有桁架机械手、交换托盘、物流小车以及工业机器人等。
机加工自动化的主要用途是将机加工自动化上轨道上的原料工件送到机床内,等到加工完毕再将成品取出,重复操作。桁架机械手的工作范围决定了其构成,主要由机加工自动化和定位设备组成,其中上料及下料操作定位的精密程度决定着产品的质量。
机加工自动化生产线主要实现机床制造过程的全盘自动化,并采用了集成加工技术,适用于生产线的上下料、工件翻转、工件转序等。在国内的机械加工,目前很多都是使用专机或人工进行机床上下料的方式,这在产品比较单一、产能不高的情况下是非常适合的。随着社会的发展、科技的进步、产品更新换代加快,使用专机或人工进行机床上下料就暴露出了很多的不足和弱点。首先,专机占地面积大、结构复杂、维修不便,不利于自动化流水线的生产;其次,传统上下料方式的柔性不够,难以适应日益加快的变化,不利于产品结构的调整;再次,使用人工会造成劳动强度的增加,容易产生工伤事故,效率相对低下,且使用人工上下料的产品,其质量稳定性不足,不能满足大批量生产的需求。
在多台数控机床组成的加工生产线上,遇到机加工节拍时间较长的加工环境,受限于当前主要的自动化设备的空间布局形式,扩展机器人的的应用范围,对工业机器人增加了第七轴移动轴,通过地轨式或者天吊式机器人实现长产距离的移动,但仍然受限于机器人行走轨道只能在一条直线上。无法实现对车间平面布置的多台数控机床实现自动化上下料。
移动机器人移动机器人正从固定单一的模式,向灵活、可执行多重任务的方向转变。AGV+机器人可以实现更高的灵活和高效自动化加工应用以往只有汽车制造商和其他处理大型零部件的行业才会引进机器人,时至今日,机器人行业的许多进步成果都集中在消费品制造业、仓储和配送中心。
自主移动机器人“实施完全自主的系统在技术上是可行的,而且成本不会太高。全球的汽车、汽车零部件、其他运输工具、电子电器等领域都希望减少材料运输成本。”通常,小工厂所使用的机器人比大型工厂中的灵活性更高,功能也更多,并且小工厂更能受到机器人所带来的红利。机器人与AGV系统集成后,就能将加工材料从工具机床和车床移动到仓储区。FANUC协作系统机器人协同作业机器人(以下简称:协作机器人)可以与人员在同一个空间工作,而不像传统的工业机器人那样需要将人和机器人使用安全围栏隔离开。如果协作机器人与其周边的人员或物体发生触碰,机器人将自动停止。协作机器人具有协作性、安全性、快速学习、适应能力强和高效等特点(见表1)
表1 协作机器人特点
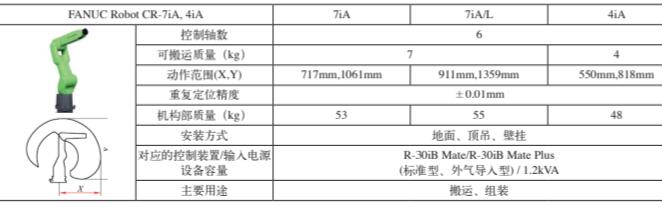
FANUC Robot的特点:
1.协同作业
无需安全栅栏,人与机器人可共享某个区域进行作业,而不像传统的工业机器人那样需要将人和机器人使用安全围栏隔离开。人与机器人可相互协调,毫无障碍地进行重零件的搬运、零件的装配
等各种作业。
2.安全功能
已经取得符合国际标准ISO 10218-1:2011, Category 3, PL=d的安全认证。接触到人时,协作机器人会安全地自动停止。表面是给人以安心感的绿色的柔软的罩壳,缓和冲击力,防止人被夹住,从而保证人员不会受到伤害。
3.智能化和高可靠性
可利用iRVision(内置视觉)等各种最新的智能化功能。采用与以往的机器人相同的高可靠性设计,用户可放心使用(见图1)
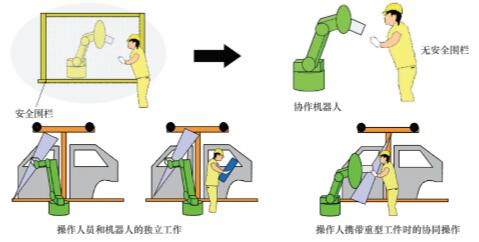
图1 FANCU协助机床机器人快速启动的QSSR功能
只需要使用一根网线即可以轻松实现连接CNC与机器人(见图2)。
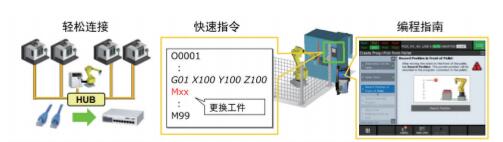
图2 CNC与机器人互联
FANUC QSSR具有快速简便设置功能,可以实现CNC与机器人系统的快捷设定。机床与机器人可以通过显示界面相互确认对方状态。在CNC机床啥够可以轻松实现机器人的示教功能。使用FANUC 数控系统的快速指令代码(M代码),轻松操作机器人。
AGV+协作机器人在零件加工上下料单元中的应用
1.智能制造单元组成
车床单元,车床要求(设备类型):数控车削中心
最大车削直径:≥200mm。
最大加工工件长度:≥150mm。
主轴最高转速:≥5000r/min。
配置自动刀塔,刀塔容量:≥12r/min。
配置FANUC数控系统,系统具备局LOADER轴功能。
桁架要求,桁架动作控制由车床CNC的LOADER轴功能控制。
立加单元,立式加工中心要求,设备工作台面距地面高度:800~1000mm;主轴端面距工作台面最大距离:750~950mm。
刀库容量:≥24,刀柄形式:BT40。配置C轴转台,转台台面直径:
150mm。主轴转速:10000r/min。☆C轴转台转台型号:CNC-200R(β电动机),四轴联动。
夹具要求,夹具设计需要满足零件4个机加工面加工,夹具以零件外型定位和夹紧,夹具配置气检、定位面清洗功能,保证工件装夹可靠性。
2.零件加工单元对AGV+FANUC协作机器人的主要功能要求
(1)AGV底盘框架。AGV小车底盘框架设计时,要充分考虑AGV小车本身自重、机械手本体及电控柜负重与尺寸、附加逆变器与电池负重与尺寸等,外形美观,符合人体工程学要求;在满足功能的前提下,充分考虑空间布局以方便后续维护,尤其是对于机械手电控柜的布局,考虑电柜散热问题,机械手电控柜门可全面打开方便维护,机械手示教器建议外挂,方便现场调试。
(2)MES接口。本次实现AGV+协作机器人单元,支持MES系统通过无线局域网对AGV小车的任务管理,具体为,任务查询:支持MES系统对当前正在执行或排队等待执行的任务查询,具体为任务标识、任务详细、任务优先级、任务执行状态等;任务下达:支持MES系统对AGV小车的任务下达(如特定AGV任务、充电任务等),同时AGV反馈任务下达标识信息。修改或取消任务,支持当任务尚未执行时,MES系统可实现对任务的修改或取消任务;汇报任务执行情况;当AGV成功完成一项任务或由于某些特殊原因导致无法完成某项任务时,AGV小车需向MES报告任务执行结果;支持MES系统通过无线局域网对AGV小车的状态信息查询,如AGV当前站点、运行状态(待命、运行、停车、急停等)、当前运行速度和方向、外部DI/DO状态、当前电池电压等。
(3)与机械手的信息交互。除了与MES系统进行通讯外,一般现场设备还需要与AGV进行物理对接,如在本项目中,要通过AGV上的机械手实现机床的上下料,这时就需要与机床进行信号交互,考虑到Fanuc机械手与Fanuc CNC通讯的便利性,这里由Fanuc机械手与FanucCNC来实现上下料过程中的信号交互,但需要AGV小车支持通过现场总线或硬件IO的方式,将当前点位状态等信息发送给Fanuc机械手,Fanuc机械手在获得点位到达信号后,再实现相应的动作需求。
(4)无线局域网通讯系统。本项目中AGV与MES,AGV上Fanuc机械手与Fanuc CNC均通过通讯速度高、抗干扰性好的无线通讯方式,无线通讯距离能够覆盖整个小车运行范围。其中AGV与MES的通讯,可通过AGV小车本身的无线网卡接入到局域网;对于AGV上Fanuc机械手与Fanuc CNC的通讯,采用无线EtherNet/IP协议,考虑无线传输的稳定性、干扰等因素,在AGV小车上额外增加无线AP,专用于Fanuc机械手与外围设备的通讯。
(5)人机界面。操作员可通过AGV本体上的人机界面,实现设对AGV的网络设置、系统参数设定、运行状态查询、故障查询等。一旦AGV出现故障,操作和维护人员能够通过AGV的故障诊断系统及时准确地查找故障的原因,便于故障的排除。
(6)设备工况监控。支持对AGV的运行状态及任务信息等进行监控,以图形化的界面对AGV行进路线与位置信息进行显示;支持对任务信息历史、AGV工作状态日志查询等功能,可供专业人员在维修或维护时解读。
(7)充电系统。为机器人提供可靠的充电供应,充电效率高,输出功率大,充电状态稳定可靠,并能通过无线网络实时监控;充电接口输出可控,非充电状态下,充电接口处于断电状态,小车自动充电时充电桩进入充电状态。无法自动充电时支持人工手动进行充电。AGV+协作机器人实现自动化物流搬运与上下料AGV工作循环。人工启动加工循环→AGV+机器人单元自动到单元料架上抓取零件,并放置到AGV暂存台上→AGV移动到车床加工单元上料口部位,机器人自动将芯轴零件放置到上料台上→AGV移动到高速立加设备前方,机器人将零件放置到设备夹具上,完成上料动作→待立加加工结束后,机器人从设备夹具上抓取零件至AGV暂存台上→AGV自动移动到车床加工单元下料口部位,待芯轴零件加工完成并放置到下料口部位,机器人自动抓取芯轴,放置到AGV暂存台上→AGV返回单元料架,机器人将零件放置到单元上料台上。
结语
该机器人项目将智能AGV技术与协作机器人相结合,通过在区域内的自主移动,实现货物的智能抓取、搬运和操作。突破了常规机器人只能在导轨上作直线运动的限制、区域移动小车在行驶过程中存在的安全隐患、移动后再定位精度低的问题。同时,借助机械臂内置的工业相机,以及AGV小车中的电池及逆变电流器,让AGV小车可以自由载着机械臂到达指定工位,进行产品的精密的定位和抓取、放置。两种智能技术互相成就,成为彼此自由的双手双脚,极大拓展了机械臂与AGV小车的适用范围,为零件加工机床自动化上下料的智能化打开了新的空间。
投稿箱:
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com
更多相关信息

