


数控凸轮轴磨床运动误差分析与建模技术
2018-8-7 来源:北京工业大学机械工程与应用电子技术学院 作者:范晋伟,王鸿亮,张兰清,唐宇航
摘要: 为了对某数控凸轮轴磨床的运动误差进行分析和建模,分析研究了各运动部件间运动形式和误差类型,运用相邻体坐标系间的运动变化来表达 2 相邻体之间的运动情况,建立了相邻体之间的理想运动方程和有误差情况下的实际运动方程. 将相邻体间的实际运动方程进一步推广到任意低序体阵列分析当中,为研究多分支数控凸轮轴磨床误差建模提供理论基础. 将复杂的多分支链数控凸轮轴磨床抽象为简单的多体系统,对各运动部件建立相应的体坐标系和运动参考坐标系,求出相邻体间对应的变换矩阵. 最后,将机床运动部件划分为“工件-床身”和“砂轮-床身”2 条运动链,提出了有误差影响情况下实现精密加工约束条件方程为 Pw= Pt,且对该方程进行了求解,为数控凸轮轴磨床误差补偿的研究提供了必要条件. 结果表明: 误差补偿后的机床加工精度显著提高.
关键词: 数控凸轮轴磨床; 误差分析; 多体系统; 运动关系; 误差建模
凸轮轴广泛用于汽车、摩托车、内燃机等发动机,主要控制气门的开启与闭合,其轮廓的加工精度直接影响发动机的工作性能. 数控凸轮轴磨床作为最常用的高效、高精度凸轮轴加工最后一道工序设备,其精度保持性至关重要. 但考虑到所有机床均会面临工作中由于各种误差引起的工作精度降低问题,这就需要对机床进行误差分析,并采取适当措施进行误差防止或误差补偿. 因此,减小误差对机床加工精度的影响方法可分为误差防止法和误差补偿法. 误差补偿法是在不改变原有机床的基础上,通过建立机床误差模型,辨识机床各项误差并通过修正数控指令的方法来减小机床误差对工件加工精度的影响. 误差补偿法克服了传统误差防止法费用高、适用性差等缺点而得到了迅速发展.机床运动误差分析与建模是误差补偿的基础,对机床误差能否正确分析是误差建模的关键问题.为提高数控凸轮轴磨床加工精度以及精度保持性,有必要对数控凸轮轴磨床的运动误差分析与建模进行研究. 目前,国内外对数控机床误差补偿技术的研究主要有: 粟时平采用多体系统理论对多轴数控机床精度建模与误差补偿方法进行了研究. 范晋伟等对提高精密凸轮磨削精度的几何误差补偿技术进行了研究. 李建对凸轮轴数控磨削误差分析和补偿技术进行了研究和软件设计. 王维等采用多项式拟合与线性拟合方法对数控机床几何误差与热误差进行综合建模和误差在线实时补偿. 王晓峰对复合数控机床几何误差补偿及误差影响溯源进行了分析. Lechniak 等提出了利用离线软件进行误差补偿. Chnan 等对三轴磨床几何和力的误差补偿进行了研究. ZHANG 等利用双球杆仪对五轴数控机床回转工作台误差进行了检测和补偿.
机床一般都是由多个运动体组成的复杂机械系统,多体系统理论是将对复杂机械系统的分析分解为对运动体分析,然后将其耦合. 数控凸轮轴磨床是特殊轮廓加工机床,随着近年来随动式凸轮轴磨床的应用越来越广泛,以往的误差分析和建模方法太过于复杂,机床误差建模又缺乏通用模型,不同类型的机床需建立不同的误差模型,而多体系统理论能用于降低机床误差建模的难度,很少有人将多体系统理论应用到该机床误差建模中,因此本文采用多体系统理论对随动式数控凸轮轴磨床进行了建模技术研究.
1、 数控凸轮轴磨床运动分析及误差分类
对某随动式数控凸轮轴磨床进行三维建模并简化,其结构示意图如图 1 所示. 该机床是一种特殊的三轴机床,其运动包括砂轮架沿砂轮架底座的 x向移动,工作台沿床身的 z 向移动以及主轴带动工件绕 c 轴的转动. 在工作中主要是通过控制 x 轴和c 轴的联动来完成凸轮轮廓的加工. 通过多个运动单元组成的机床,各运动单元的误差可分为与位置点无关的误差和与位置点有关的误差. 与位置点无关的误差包括: x 轴与 z 轴和 c 轴之间的垂直度误差以及 z 轴与 c 轴之间的平行度误差,如图 2( a) 所示.在空间坐标系中任意物体均有 6 个自由度,在运动过程中必然产出 6 项误差,3 项线位移误差和 3 项角位移误差,这些误差是与位置点有关的误差,三轴机床共有 18 项与位置点有关的误差,以 x 向移动部件为例来说明如图 2( b) 所示,各项运动误差参数如表 1 所示.
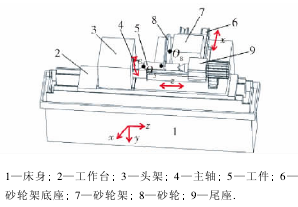
图 1 数控凸轮轴磨床结构
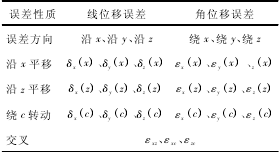
表 1 数控凸轮轴磨床几何误差参数

图 2 误差参数
2 、数控凸轮轴磨床拓扑结构及低序体阵列描述
多体系统是指由多个刚体或柔性体通过某种形式连接而成的复杂机械系统,多体系统运动学理论是指将机床的各个运动部件看作不同的刚体,对每个刚体分别建立体坐标系和运动坐标系,并对多体系统每个分支按照由小到大的顺序进行排列,将机床的运动变为刚体坐标系之间的运动,对机床的运动分析变为多体坐标系之间的运动分析. 利用多体系统运动学理论对该数控机床进行拓扑结构及低序体阵列描述,以床身为分支起点,按床身-砂轮和床身-工件分支划分,最后再以磨削点位置为终点,使机床组成闭环系统. 故该机床共有 2 条运动链,分别是由 1-6-7-8 体组成的床身-砂轮链( B-T) 和 1-2-3-4-5 体组成的床身- 工件链( B-W) . 该机床的拓扑结构图如图 3 所示. 拓扑结构的低序体阵列如表2 所示.
3 、相邻体运动关系模型的建立
对机床各运动部件进行分解,研究相邻体间的运动学关系,最后通过变换矩阵乘积耦合建立整个机床的运动模型,可以大大降低直接研究多个运动体关系的复杂度.
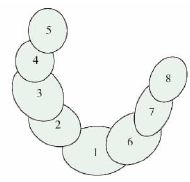
图 3 数控凸轮轴磨床拓扑结构
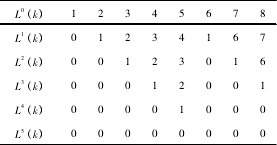
表 2 数控凸轮轴磨床拓扑结构的低序体阵列
3. 1 理想情况下相邻体运动关系模型的建立
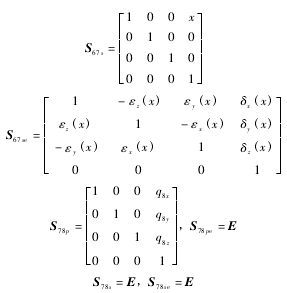
图 4 为理想情况下相邻体 Bi和 Bj的相互关系,Oi和 Oj分别为两相邻体的体坐标系,Qj为固定在 Bi体上的 Bj的运动参考点,Bj相对于 Bi的相对位置可用 Qj相对于 Oi的位置矢量 pj来表示,Bj相对于 Bi的相对移动可用 Oj相对于 Qj的位移矢量 sj来表示,R为惯性坐标系,因此相邻体间的运动关系可由相邻体坐标系之间的变化来表示.
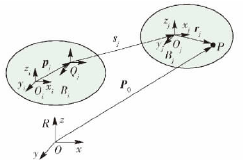
图 4 理想情况下相邻体相对运动
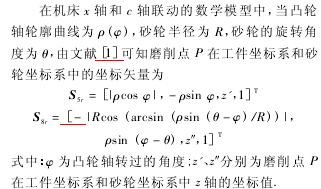
设 P 为 Bj体上任意一点,由上述分析可知,P在 Oi-xiyizi坐标系中的位置矢量为.
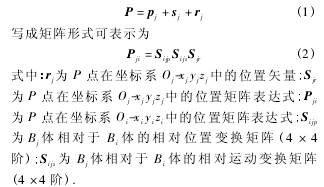
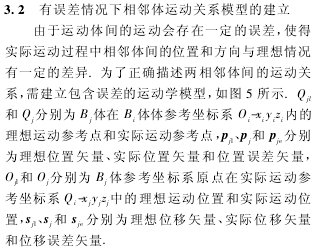
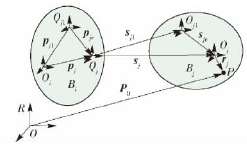
图 5 有误差情况下相邻体相对运动示意图
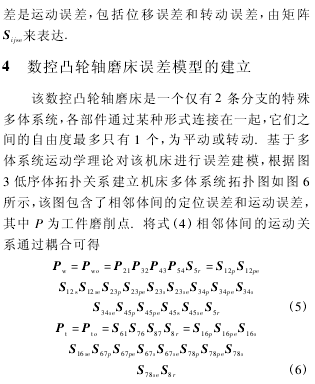
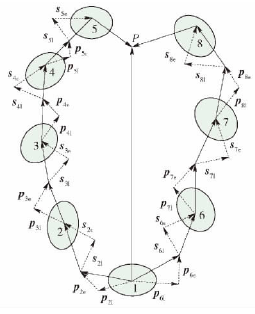
图 6 数控凸轮轴磨床拓扑结构
为实现机床精密加工,必须使砂轮磨削点在惯性坐标系中的坐标与工件磨削点在惯性坐标系中的



精密加工约束方程中的 21 项误差参数可通过双球杆仪并配合多体系统理论进行测量和辨识,通过建立刀具路线和数控指令的映射关系以及数控指令和实际刀具轨迹的映射关系,利用这 2 个关系可以对有误差情况下的数控指令进行修正,并进行判别得到满足精度要求的数控指令值,考虑到篇幅问题对于误差补偿过程不在叙述. 该方法已进行了实验,利用误补偿后的机床加工某汽车发动机进排气凸轮轴,通过与补偿前机床加工比较凸轮轴的最大升程误差已由 22 μm 降到了 9 μm,由此可见,误差补偿后的机床加工精度已显著提高.
5 、结论
1) 对数控凸轮轴磨床基本结构进行了分析,各相邻体之间的连接形式分别为刚性连接、导轨滑动连接和轴承连接的一种特殊的多体系统. 因此可将数控凸轮轴磨床直接抽象为具有“工件- 床身”和“砂轮-床身”2 条运动链的开环多体系统,完全可以利用多体系统运动学理论对机床进行简化分析和建模,最后再以工件磨削点和砂轮磨削点重合使系统形成闭环系统.
2) 对数控凸轮轴磨床几何误差进行了分析,将误差类型分为了与位置点无关误差和与位置点有关误差,分析了不同类型误差的作用机理,提出了误差参数的描述方法.
3) 运用多体系统误差分析理论,对数控凸轮轴磨床建立了误差分析模型,推导出了工件磨削点运动约束方程的表达式,给出了实现精密加工的必要条件,为数控凸轮轴磨床误差补偿的研究提供了必要条件.
投稿箱:
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com

