
摘要:插床中插刀的上下往复运动直接关系到工件切削的效率.建立插床六杆机构的矢量模型,用M atlab /Sim ulink 中的积分模块建立仿真框图,设置合理的初始条件,将插刀的位移、速度和加速度曲线规律可视化.对机构作计及摩擦力的静力分析,通过摩擦圆和相对角速度判断运动副所受摩擦总反力的方向,依次求解各个构件的静力平衡方程式,得出主动件上所能克服的等效阻力矩,并用M atlab 软件得出等效阻力矩随时间变化的规律.
插床是一种应用广泛的普通机床,利用插刀的上下往复运动完成对键槽和型孔的插削工作,尤其适用于加工不通孔或有障碍台肩的内孔键槽.插床中的六杆机构是以双曲柄机构为基础扩展而成的,可以实现预期的运动规律并与插刀相连,实现切削主运动.文献[1 −7]介绍了用PR O /E 和M atlab 工具箱中的Sim ulink 构建曲柄导杆机构、曲柄摇杆机构和曲柄滑块机构等平面机构的仿真模型,或进行运动规律分析,或进行动力学分析,但鲜有文献对机构作计及摩擦力的静力学分析,而静力分析对计算机构各零件的强度、确定机械效率及机械工作时能克服的阻力矩等因素具有非常重要的作用.
本研究抽象出插床六杆机构的矢量模型,建立数学模型,使用M atlab /Sim ulink 中的积分模块对插刀进行运动仿真,将插刀的位移、速度和加速度曲线可视化,以便直观地表达插刀的运动规律.计及摩擦力的机构静力分析,借助摩擦圆和相对角速度的转向获得各构件的摩擦总反力方向,求解各构件的静力平衡方程,在工作阻力已知的情况下确定主动件上的平衡力矩随时间变化的规律.
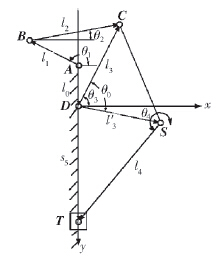
图1 插床六杆机构
F ig.1 Slotting m achine six bar linkage! 插床六杆机构的矢量模型插床六杆机构如图1 所示,AB C D 为双曲柄机构,主动件AB 和从动件C D 作整周运动,B C 为连杆,AD T 为机架,D ST 为曲柄滑块机构,滑块T 为插床的插刀.对机构中的各个构件用带箭头的直线表示为位移矢量,位移矢量的大小即构件的长度,矢量与x 轴正向所夹的角即为构件的夹角﹙逆时针为正﹚.将双曲柄机构AB C D 和曲柄滑块机构D ST 看成封闭矢量多边形,由复数矢量法可知
A B + B C = A D + D C , ﹙1﹚
D S + ST = D T . ﹙2﹚
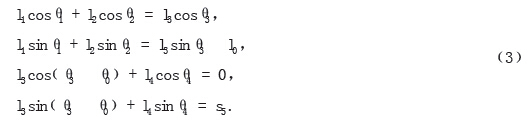
将式﹙1﹚和式﹙2﹚中各矢量分别向x 轴和y 轴投影,得到投影方程为
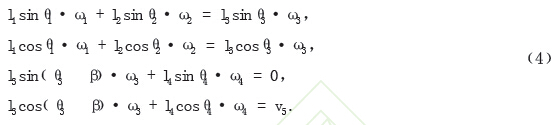
" 用积分模块法建立仿真模型分别对式﹙3﹚的4 个方程求导,得到速度方程组:
将方程组﹙4﹚写成矩阵形式:

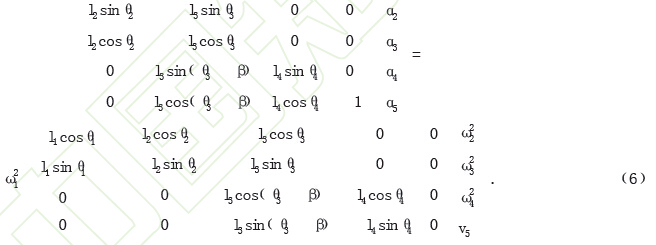
对式﹙5﹚求导,得到加速度方程组的矩阵表达式:
对插床六杆机构进行仿真分析时,初始条件必须满足相容性,设主动曲柄的初始位置为0 rad,角速度为1 rad /s,其他构件的位移和速度初始值可根据公式﹙4﹚和﹙5﹚求得,见表1.
表1 仿真的初始条件
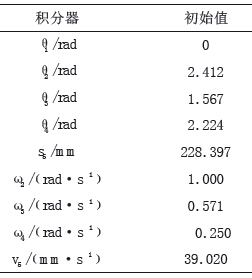
设六杆机构中l1 = 90 m m ,l2 = 120 m m ,l3 = 140 m m ,l4 = 200 m m ,l0 = 60 m m ,主动曲柄的初始位置θ1= 0 rad,角速度ω1 = 1 rad /s﹙6.28 s 为1 个周期﹚,仿真时间为10 s.求解加速度方程需要编写M atlab 函数m yfun _ sixbar,该函数的输入参数为各个构件的位移和速度,输出参数为各个构件的加速度.利用Sim ulink 积分模块,通过加速度计算速度和位移,过程如图2 所示.
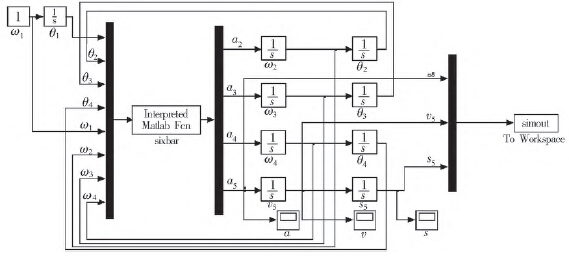
图2 积分模块法表示的插床六杆机构的仿真模型
F ig.2 Sim ulation m odel of slotting m achine six bar linkage used integral m odule m ethod为了观察插刀的位移、速度和加速度运动规律,在模型的相关位置分别安装示波器,以实现计算结果的可视化,见图3 至图5.
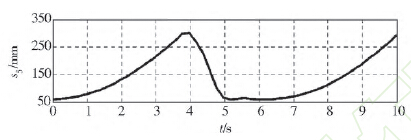
图3 插床六杆机构中插刀的位移曲线
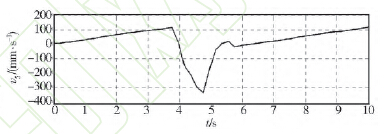
图4 插床六杆机构中插刀的速度曲线
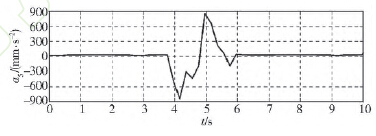
图5 插床六杆机构中插刀的加速度曲线
从图3 可知,插刀一个周期的用时约6.2 s,行程约260 m m ,工作行程用时约3.9 s,而返回行程用时仅约2.3 s,这说明插床六杆机构具有急回运动.从图4 和图5 可知,插刀的工作行程近似符合等加速度运动规律,而在返回行程的初始阶段,速度显著增大,随后又急剧变小,致使加速度有较大的峰值,说明此时构件受到了较大的惯性冲击力,为类似的机构优化设计提供了改进的方向.
3、 计及摩擦力时的机构静力分析
插刀5 上作用有工作阻力F ,假设最大工作阻力F = 1 000 N ,摩擦系数为f = 0.1 ,则摩擦角Φ=arctan f.各铰链的销钉半径r = 10 m m ,当量摩擦系数为fv 时,摩擦圆半径ρ= fvr .F ij表示第j个构件受到第i个构件的摩擦总反力,方向与摩擦圆相切,指向与相对角速度的转向相反,如图6 所示.
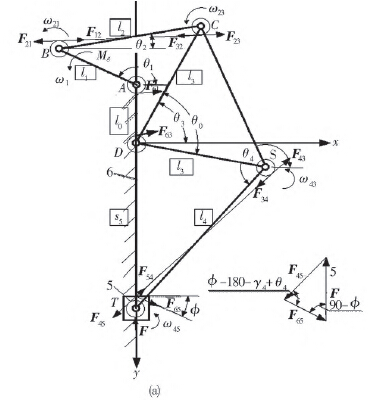
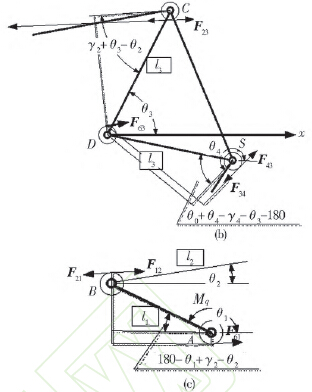
图6 考虑摩擦时机构的受力分析
插刀5 受到了三力作用,如图6 ﹙a﹚所示,三力汇交于一点,F 是已知的工作阻力,由力的三角形可得
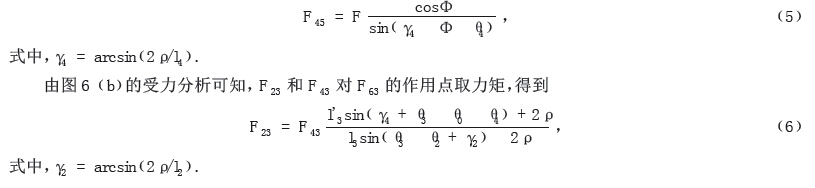


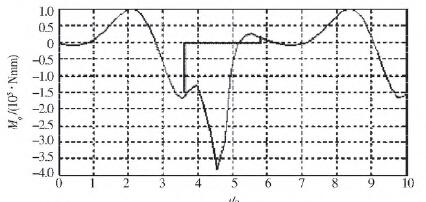
图7 主动件上等效阻力矩随时间变化的曲线
4、结语
本研究用M atlab /Sim ulink 中的积分模块实现了插床六杆机构中插刀的位移、速度与加速度运动规律的可视化.提出了计及摩擦力的机构静力学分析,借助摩擦圆和相对角速度的转向得到了各构件运动副上摩擦总反力的方向,通过静力平衡方程求得摩擦总反力的大小,并获得了主动件上所能克服的等效阻力矩随时间变化的规律.
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com
- target=_blank>试论数控机床电气控制中控制电器的选用
- target=_blank>伊斯卡研发部门为勇于进取的用户输送高收益
- target=_blank> 曲轴端面加工中心立柱的动态特性分析
- target=_blank>3D 金属打印机器和设备的创始人Frank Herzog 先生获 2015 年度德国未来奖决赛提名
- target=_blank> 浅谈电火花线切割数控机床加工特点及发展方向







