
一种新型四摆臂履带式救援机器人的行走机构设计
摘要:依据灾难救援的现实要求和对国内外救援机器人典型结构的分析比较,提出一种由主体模块、内摆臂模块和外摆臂模块组成的新型行走系统,设计了相应的传动机构及关键尺寸,结合跨越台阶分析了机器人的行走形态及各模块的运动方式,体现了所设计救援机器人的重心位置调节功能在提高越障能力和越障过程平稳性方面的作用。
关键词:履带式救援机器人;行走系统;模块化设计;重心位置调节
0. 引言
救援机器人是移动机器人在灾难救援领域中的一种应用。目前问世的救援机器人种类较多,其中具有多地形适应性的移动机构主要有轮式、履带式、腿足式、多节履带式(腿履复合式)等类型。此类移动机构在具体应用时常存在越障性、灵活性与机械结构、控制系统开发方面难以协调统一的问题。例如轮式履带式机器人结构简单,易于控制,但其越障性能不高,运动灵活性不高;多节履带式救援机器人具有较多的关节数和自由度数,运动灵活性和地形适应性高,但传动系统和控制系统复杂【l】。因此,如何使移动机构与功能要求得到最佳匹配,是救援机器人开发与应用的关键问题。
现通过对常用四摆臂履带式救援机器人配置结构的改进,提出一种质心位置可调的新型四摆臂履带式救援机器人结构方案,并完成行走系统的设计。与传统的四摆臂履带式机器人相比,该结构最大的创新点在于取消了主体履带.加强了4个摆臂的作用.同时通过对主体模块的转动控制.可以调整质心位置和变换触地的摆臂履带。该机器人综合了多节履带式救援机器人的优点,具有较强的地形适应能力和越障能力。同时该机器人整体结构布局紧凑,具有一定的对称性,且未增加自由度和控制难度。
1.救援机器人行走系统方案设计
目前。国内外均较为重视救援机器人的研制工作,并取得一定的研究成果。日本东京工业大学广濑研究室从仿生的角度和基于超机械系统的思想先后研制了AcM、GENBU与soRYu等多款救援机器人样机.可在各种狭小场所甚至水下进行救援【2】。美国“机器人辅助搜救中心”已经投入灾难救援现场使用的8种机器人。包含了轮式、腿式、腿履复合式等多种结构,在现场取得较好效果。在我国,中国科学院沈阳自动化研究所以及各大高等院校均开展了有关救援机器人的研究【3]。广州卫富科技公司研制的“卫富”危险作业机器人,采用三节折叠式履带移动机构,可轻松翻越40咖高的障碍。上下400斜坡和楼梯。沈阳自动化研究所灵蜥系列机器人,采用轮一腿一履带复合式移动机构。行走方式的不同切换使其具备较强的地面适应力。
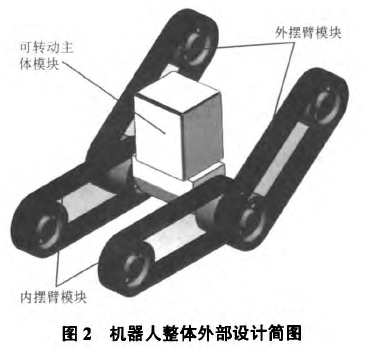
救援机器人的越障性能是实际环境特点与机器人机构特点交互作用的结果。在机器人的设计过程中.除了提出满足基本越障要求的机构方案,还需要根据实际环境对机器人关键尺寸的约束。以保证救援机器人具有良好的机动性与越障性能。灾难现场环境特点较为复杂,文中所提出救援机器人的设计则是根据R0bocup国际救援机器人大赛所提供的简化场地考虑的。它可分为结构地形和非结构地形,结构地形包括楼梯、高台、斜坡等规则地形.非结构地形形状不规则,但也是规则地形的重组与配合。图l所示为本课题组前期研制的一种四摆臂履带式移动机器人,行走系统采用主体模块和4个摆臂的配置方案。通过对4个摆臂的协调控制使其具有较强的越障性能。该行走系统共有6个自由度,是目前国内外较为常用的结构形式。现对这种多节履带式行走系统进行改进,主要是取消了主体履带。改进后的行走系统三维外观如图2所示,它由主体模块、内摆臂模块和外摆臂模块组成,控制履带转动与摆臂摆动的传动机构都放置在摆臂内部,空间布局紧凑、对称;外摆臂可绕摆臂中心轴摆动以辅助越障.主体模块可围绕中心轴转动,以调节重心,增强越障过程中的整体稳定性。

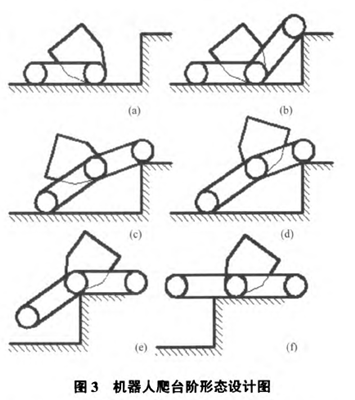
该救援机器人行走方案的设计,主要是强化了4个摆臂的作用。图3所示为机器人爬台阶时的形态设计图,图3(a)表示机器人先以正常姿态行驶至台阶前一定距离,此时内外摆臂并未展开:图3(b)表示机器人外摆臂摆动至台阶触停;图3(c)表示机器人继续行驶同时外摆臂摆动.此时机器人重心在后;为保证机器人爬台阶过程中的运动平稳性以及驱动力方面考虑,图3(d)中主体模块向前转动一定角度:此后履带继续转动,机器人接近攀爬成功,如图3(e)所示;图3(f)中摆臂已恢复水平位置,机器人成功爬上台阶。在整个爬台阶的过程中,机器人充分利用了前后摆臂的支撑作用,以及主体模块前后摆动、及时调节重心的作用,保证了机器人越障时的平稳性。
2.救援机器人传动系统方案设计
根据救援机器人行走系统设计要求,当内摆臂模块与
地面接触时,机器人存在履带转动、主体模块摆动和2个外摆臂的相对独立转动等4个自由度。图4所示为该机器人一侧内外摆臂和主体模块的传动机构简图(异侧结构对称)。该方案的空间配置使救援机器人结构紧凑、对称,具有良好的空间利用率。
2.1机器人履带转动传动系统设计
如图4所示,履带转动机构置于外摆臂内部。直流伺服电动机l经自带的减速器减速后,通过锥齿轮副2带动外摆臂内传动短轴3转动,经过链轮4、链5形成的链传动将转动效果传递到套筒6上,这样,套筒即可带动驱动轮7使得履带进行转动。其中,同侧的内外摆臂是联动的,均由同一个电动机提供驱动力。履带转动运动传递路径为:1—2—3—5-珥—+6—7。
2.2机器人摆臂摆动传动系统设计
图4中摆臂摆动机构置于内摆臂内部。其中,直流伺服电动机12经内部减速器减速后。首先带动蜗杆13进行转动。从而蜗轮14继之转动.内摆臂内传动短轴15将转动效果传递到链轮16、链17形成的链传动,从动链轮与摆臂中心轴18是键连接的。而轴18与外摆臂挡板通过法兰固定。从而,电动机驱动可引起外摆臂的摆动。摆臂摆动运动传递路径为:12一13一14一15一16一17一18。值得注意的是,套筒7与摆臂中心轴18是同轴的,二者相对主体中心轴11均可自由转动,并且通过轴承、法兰等连接具有摆臂摆动与履带转动不同的运动形式,从而实现双自由度输出。
2.3机器人主体模块摆动传动系统设计
如图4所示.主体摆动机构置于主体模块内部。电动机8的输出轴带动小齿轮9转动,并咬着大齿轮10进行公转,大齿轮通过花键与挡圈固定在主体中心轴ll上,而后者靠法兰固定在内摆臂内侧板上。通过合适的框架结
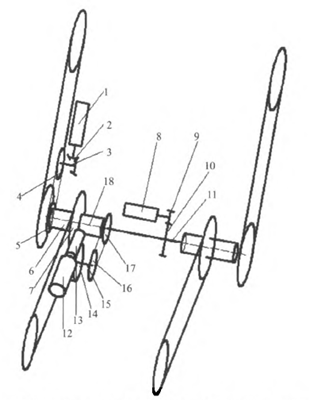
l一主覆带电动机;2、3一锥齿轮副;4一主覆带链轮;5一主覆
带传动链;6一套筒;7一覆带驱动轮;8一主体电动机;9、lO一主
体直齿轮副;11一主体中心轴;12一摆臂电动机;13一蜗杆;14一蜗轮;
15一传动短轴;16一摆臂链轮;17—摆臂传动链;18一摆臂中心轴
图4机器人传动方案机构简图
构可使小齿轮固定在主体箱上,这样,主体便可以围着主轴进行转动,从而方便整体质心的转移。
3.救援机器人主参数设计
结合Robocup国际赛事所提供的地形,基于迷宫宽度、高台、楼梯等结构地形的具体尺寸。可确定机器人的关键尺寸。其中,走廊宽度形=l 200嗍,高台高度日=300 mm,楼梯踏步高^=200 mm,楼梯踏步宽6=250 mm。综合各项指标,使机器人在满足越障基本要求下,具有更加紧凑的尺寸。
由于机器人的工作环境具有一定的非结构化和不确定性,机器人在运动过程中与环境的交互作用较为复杂。针对机器人的结构特点及其工作环境。计算时假设【5]:1)环境地面是刚性的;2)环境中无可移动的地形;3)机器人越障过程均为低速、匀速运动。且与环境平稳接触。
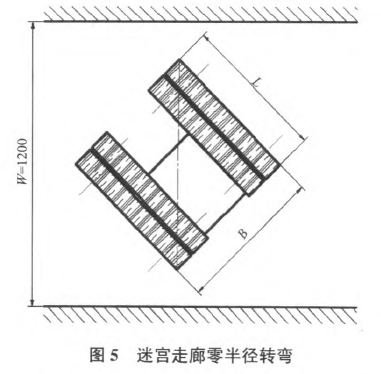
3.1走廊行走
救援机器人最基本的运动需求是在平地走廊内自由行走、转向。假设车体的宽度为曰,长度为L,且履带式移动机构可原地零半径转向,如图5所示。因此要满足该机器人最长对角线长度要小于走廊通道宽度.即:
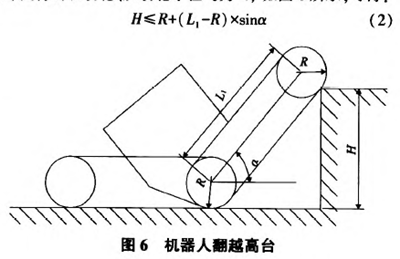
3.2翻越高台
救援机器人翻越高台过程中,摆臂长度必须要高于台阶的高度,并且当摆臂与台阶成某一角度(设a=500)时,
有足够的驱动力将机器人撑起。摆臂的中心距为L1,内外摆臂的驱动轮、从动轮半径均为尺,如图6所示,可得:
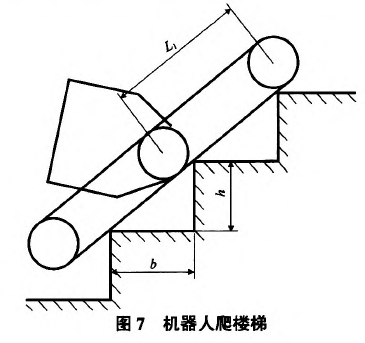
3.3爬楼梯
图6机器人翻越高台就关节式履带机器人而言,若使机器人能够平稳地爬楼梯,避免运动过程中冲击等造成的不利影响,机器人摆臂长度必须要高于台阶高度,且其展开总长至少能够跨越3个台阶。如图7所示,可得:
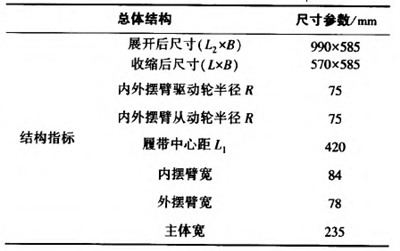
根据式(1)一式(3),并结合机器人结构参数和Robocup国际赛事所提供的参数,可得机器人尺寸的理论范围,再考虑到机器人的内部结构,链轮传动等的设计。最终确定的救援机器人部分关键结构尺寸如表l所示。
表1救援机器人总体结构尺寸
4.结语
基于灾难实地救援的现实需求,对目前国内外常见的四摆臂履带救援机器人行走系统进行改进,提出了一种由主体模块、内摆臂模块和外摆臂模块组成的新型行走系统结构,可通过对机器人质心位置的调节,来提高机器人的越障能力和越障过程的平稳性。文中详尽阐述了机器人的行走方案及其传动机构。并根据模拟环境确定了机器人的关键尺寸.可为该型救援机器人样机的研制与应用奠定了设计基础。
投稿箱:
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com
更多相关信息
- target=_blank>浅议快走丝电火花线切割机断丝产生的原因
- target=_blank>基于MckyesAli 模型盾构刀具切削软土三维力学模型研究
- target=_blank>浅谈车床加工刀具半径补偿与应用
- target=_blank> 数控车床加工螺纹时常见故障及解决方法
- target=_blank>改造和修复刀具提高耐用度节约刀具成本
名企推荐







