
含冗余驱动支链4-UPS&UP 并联机构的运动学性能分析
摘要:分析含冗余驱动支链4-UPS&UP 并联机构的运动学性能,该并联机构由著名的Tricept 机器人并联模块3-UPS&UP 机构增加一条无约束驱动支链所得。因冗余驱动支链的引入,该并联机构比3-UPS&UP 机构拥有更高的承载能力和更好的静、动态性能。在建立 4-UPS&UP 机构的位置逆解模型和7 ? 6广义雅可比矩阵的基础上,得到驱动关节速度到动平台参考点线速度的4? 3量纲一雅可比矩阵,并据该矩阵的条件数提出局部运动学性能评价指标。最后,在同尺度下对 4-UPS&UP 和3-UPS&UP 并联机构的运动学性能进行了对比分析,得到前者运动学性能优于后者的结论。
关键词:并联机构;冗余驱动;运动学性能
0.前言
为了满足复杂工况需求,要求工业机器人驱动关节的数目大于完成任务所需的自由度数。此类机器人被称为冗余机器人,包括运动冗余和驱动冗余两大类[1-2]。运动冗余通过添加额外的驱动关节以增加机构运动自由度,能够有效避免机构奇异、增大工作空间[2],主要用于串联机器人;而驱动冗余只增加驱动关节的个数,不改变机构的自由度,能有效地提高机器人的承载能力并获得较好的静、动态性能[1,3-4],广泛应用于并联机器人。并联机器人的驱动冗余通过两种方式实现:① 在不改变原机构结的基础上,增加支链中主动关节数目,使其大于机构自由度数(链内冗余);② 在原机构中增加至少一条额外的驱动支链(支链冗余)[2]。第一种方式构造简单,但易破坏原有机构的对称性,因此第二种方式较为常见[5]。受此启发,为进一步提高Tricept 混联机器人[6-7]的承载能力、刚度以及动态特性,克服其在卧式布局应用中受重力场影响,导致的驱动支链受力不均、电机力矩过载等问题,提出在其并联模块3-UPS&UP 机构的基础上,通过增加一条无约束主动支链(UPS) 得到含冗余驱动支链的4-UPS&UP 机构,如图1 所示。
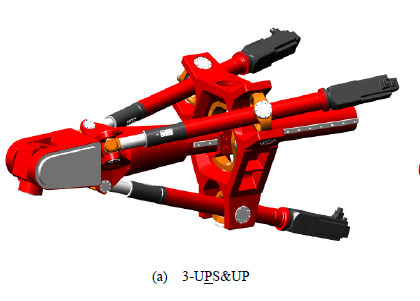
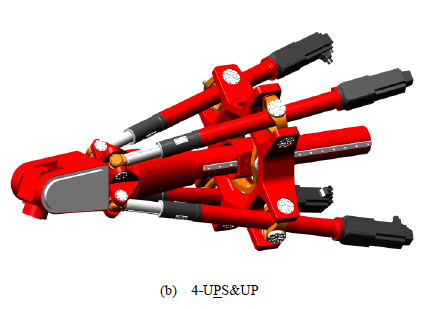
图1 分别以3-UPS&UP、4-UPS&UP 机构为主模块的混联机器人
运动学性能分析是并联机构设计的基本环节之一,其关键是选择合适的性能评价指标。目前,构建并联机构运动学性能评价指标的方式主要有两种。一是利用速度雅可比矩阵的代数特征,如行列式、条件数、奇异值等。值得注意的是,对于存在平动与转动自由度耦合的并联机构,雅可比矩阵中各项的物理量纲不一致[8],因而不能直接用其代数特征构造性能评价指标,需要首先对雅可比矩阵进行量纲归一化处理。针对该问题,ANGELES 等[9-10]提出了特征长度法。此外,还可选用动平台上若干特征点的线速度表征机构末端操作速度,建立其与驱动速度间的映射模型[11-12],进而得到量纲一致的雅可比矩阵。二是借助螺旋理论,基于虚系数[13]概念构建性能评价指标,如传递指标[14-15]、传递率[16-19]等。此类指标利用实际的传递功率与理论上可能的最大传递功率之比作为评价机构运动/力传递特性的优劣,具有量纲一致的特点。
本文以含冗余驱动支链的3 自由度4-UPS&UP并联机构为对象,在构建位置逆解模型和广义雅可比矩阵的基础上,以末端参考点的线速度为独立坐标,建立此机构的量纲一雅可比矩阵,进而利用该雅可比矩阵的条件数作为局部性能评价指标,通过算例在同尺度下分析比较该机构与3-UPS&UP并联机构的运动学性能,其目的在于初步论证该方案的可行性,以明确后续结构参数设计及承载能力、刚度、动态特性对比分析的必要性。
1.机构描述与坐标系建立
图2 示出了4-UPS&UP 并联机构的结构简图。该机构由静平台、动平台以及与相连它们的四条无约束主动UPS 支链和一条恰约束UP 支链组成。在此,U、P、S 分别表示虎克铰、移动副和球铰; P表示主动移动副。机构中的UPS 支链一端通过虎克铰和静平台连接,另端通过球铰与动平台相连;UP支链一端通过虎克铰和静平台连接,另端与动平台固接,进而使得动平台仅能作绕虎克铰两正交回转轴线的转动,以及相对虎克铰内圈的移动。易见,该3 自由度机构具有四个驱动关节(P 副),因此属冗余驱动并联机构。此外,为了提高该机构的姿态能力,可以根据不同的应用需求在UP 支链末端串接2~3 自由度转头,进而实现末端执行器5~6 自由度空间运动,如图1b 所示。
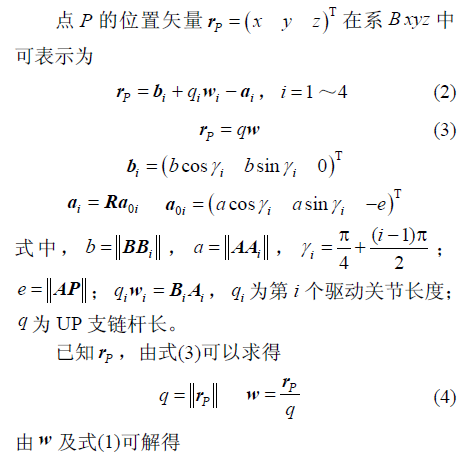
如图 2 所示,令点Bi和 Ai ( i =1 ~ 4 )分别表示第i 条UPS 支链中虎克铰和球铰中心,二者分别构成正方形?B1B2B3B4和?A1A2A3A4;点B表示 UP 支链连架虎克铰中心,且与?B1B2B3B4中心重合;点 A为UP 支链轴线与?A1A2A3A4 所在平面交点,且与?A1A2A3A4中心重合;UP 支链轴线与?A1A2A3A4所在平面垂直;末端参考点P 为UP 支链轴线延长线上的一点。在?B1B2B3B4所在平面内,以点B为原点建立参考坐标系Bxyz ,其中y 轴与UP 支链连架虎克铰轴线重合;z轴与?B1B2B3B4所在平面垂直;x 轴满足右手定则。为描述UP 支链姿态,在末端参考点P 建立连体系Puvw,其中u 轴与UP 支链连架虎克铰内圈轴线重合; w 轴与该支链轴线重合,且由点B 指向点P ; v 轴满足右手定则。于是,系Puvw相对系Bxyz 的姿态可通过首先绕连架虎克铰近架轴y 轴旋转角? ,然后绕远架轴u 轴旋转角来描述。据此,系Puvw相对系Bxyz 的姿态矩阵可表示为
此外,根据4-UPS&UP 并联机构结构特点,定义其任务空间Wt为一半径为R,高为h的圆柱体,并定义点B至Wt的最小距离为H (见图 2)。
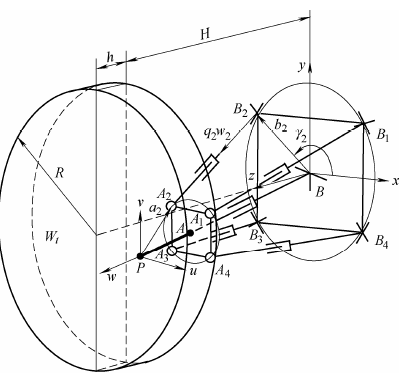
图2 4-UPS&UP 并联机构结构简图
2.运动学逆解分析
2.1 位置逆解
4-UPS&UP 并联机构位置逆解分析可归结为已知机构尺度参数和点P 位置矢量,求解动平台姿态和各UPS 支链中驱动关节长度的问题。
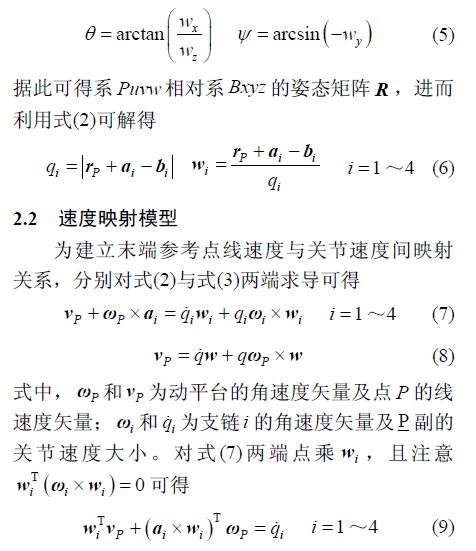
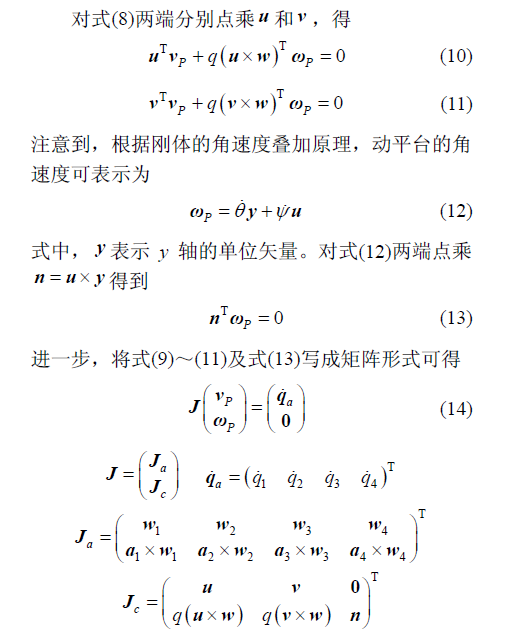
式中,J 为7? 6矩阵,被定义为 4-UPS&UP并联机构的广义雅可比矩阵[20];其中,Ja 被称为驱动雅可比矩阵, Jc 被称为约束雅可比矩阵。将其与3-UPS&UP 机构的雅可比矩阵进行对比,发现两机构的Jc相同、Ja 不同。可见,冗余驱动支链(UPS)的引入仅改变了3-UPS&UP 机构的驱动特性,对其约束特性无影响。
3.运动学性能评价
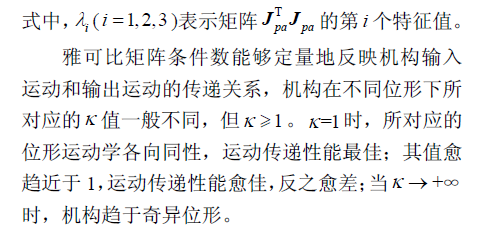
3.1 运动学性能指标

3.2 算例
现以Tricept 605 中并联模块3-UPS&UP 机构为参考对象(尺度参数见表1),在相同尺度参数及任务空间下,对比分析本文提出的4-UPS&UP 机构与3-UPS&UP 机构的运动学性能。图 3 示出了在两种机构在任务空间Wt 中z ? H 、z ? H ? 0.5h以及z ? H ? h三个截面内? 的分布。由图可见,对于4-UPS&UP 机构和3-UPS&UP机构,? 均随Wt径向和轴向尺寸的增加而单调增大;且前者呈空间四对称分布,后者呈空间三对称分布。
表1 Tricept 605 基本尺度参数 m
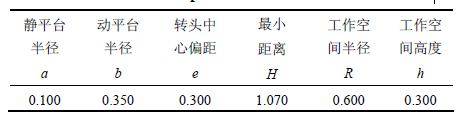
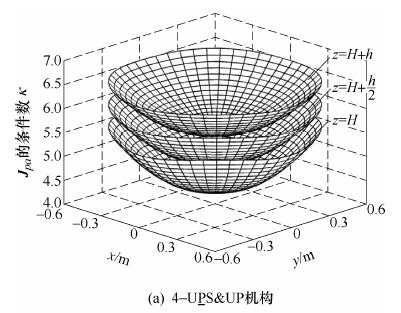
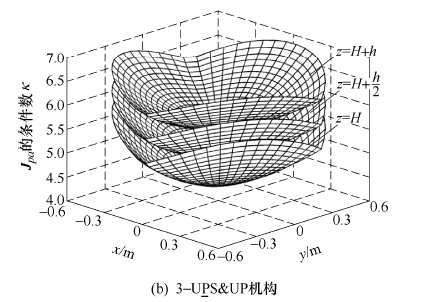
图 3 k在Wt 中的分布情况
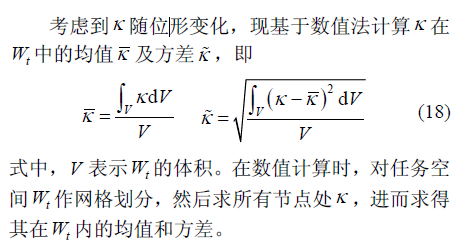
表2 给出了两种机构? 及?? 的数值计算结果。由表2 可见,4-UPS&UP 并联机构? 的全域均值和标准差均略低于3-UPS &UP 并联机构。若选取? 在Wt 中的均值? 及方差?? 作为全域运动学性能指标[22],计算结果表明4-UPS&UP 机构的全域运动学性能优于3-UPS&UP 机构。
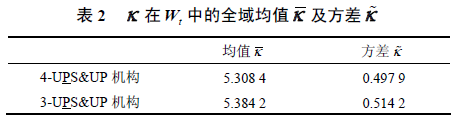
以上分析表明,含冗余驱动支链4-UPS&UP 并联机构的运动学性能优于同尺度下的3-UPS&UP 并联机构。
4.结论
本文提出了一种新型3 自由度冗余驱动并联机构——4-UPS&UP,研究了该机构的位置逆解与速度建模问题,以末端参考点的线速度为独立坐标构建了该机构的量纲一雅可比矩阵,据此提出以该矩阵的条件数? 作为局部运动学性能评价指标,并在同尺度下对比分析了该机构与3-UPS&UP并联机构的运动学性能,得到如下结论。
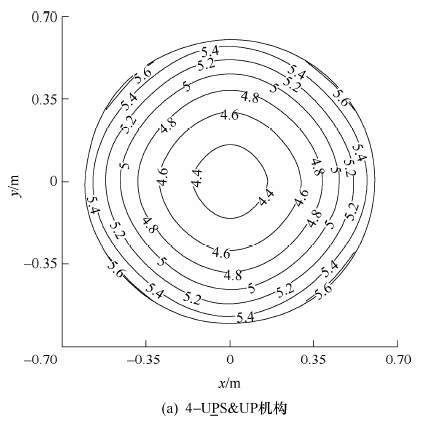
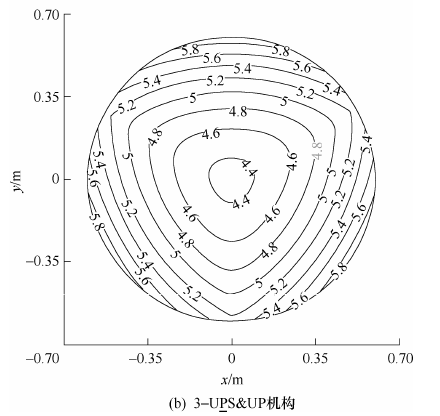
图 5 ?k 在Wt 上截面的等高线分布
(4) 综上所述,冗余驱动支链的引入有助于提高3-UPS&UP 机构的运动学性能,其对静、动态特性影响的定量分析将在后续的研究工作中开展。
投稿箱:
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com
更多相关信息
- target=_blank> 微细电火花制备大长径比微细电极的工艺研究术
- target=_blank> 基于全微分模型的打磨机械臂静态误差分析
- target=_blank> 简易花盘角铁式车床夹具的设计与应用
- target=_blank>一种适用于小线段的半径补偿 干涉回避算法
- target=_blank>浅析光学测量方法在修理企业零件制造方面的应用
名企推荐







