
基于 MATLAB 的插床机构运动学和动力学规律分析
摘 要: 插床导杆机构作为一个典型连杆机构,其运动学和动力学分析具有很强的代表性。 通常可利用图解法对插床导杆机构进行分析,由于手工绘图过程繁琐,求解精度有限,很容易产生误差。 采用矢量解析法对插床导杆机构进行分析,利用矩阵法求解,不仅求解精度高,而且通过绘出机构相应的运动和动力线图,能形象快速的表达出原动件转动角度和各构件运动和动力特性之间的关系,具有很大的优势,便于机构的优化设计。
关键词: 插床; 运动学分析; 动力学分析;连杆机构
0 引言
插床主要用来槽类特征加工。 加工时工作台上的工件做纵向、横向或旋转运动,插刀做上、下往复运动,切削工件。 插床主要由齿轮机构、导杆机构和凸轮机构等组成。 插床导杆机构即插床主运动的机构,由曲柄滑块为基础拓展而成,以低副连接形成的单自由度连杆机构。
对插床的导杆机构运动学分析和动力学分析有利于对插床工作性能的把握。 其分析方法分为图解法和解析法,图解法能简单地呈现机构的某一个或某几个位置的运动和动力特性,精度满足实际问题的要求。本文利用矢量方程解析法,分析原动件旋转角度与刀具的位移、速度、加速度,在此基础上确定出各铰支座受力以及平衡力矩之间的联系,进而得到机构整个运动循环过程中的运动学和动力学特性,为后续机构强度和机构形状设计奠定稳固的基础。
1 、插床导杆机构的运动学分析
插床导杆机构简图如图 1 所示,该插床导杆机构的工作过程可看作原动件 O2A 杆以等角速度做定轴转动,并且带动从动件 AB 杆和 BC 杆做平面运动,最后再带动插刀 5 沿导路做上、下往复运动,对工件进行切削。
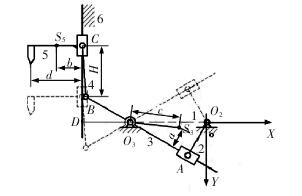
图 1插床导杆机构简图
(1)位置分析在图 1 所示的机构简图中,以 O2为原点建立直角坐标系,并标出各杆矢量及其方位角。利用三角形O2O3A 和四边形 O3BCD 两个矢量图形 ,分别建立矢量方程为:

由式(3)和式(4)即可求得导杆 3 的方位角和滑块 2 在导杆上的位置,代入式(5)和(6),即可求得连杆 4 的方向角和插刀 5 的位置。
(2)速度分析将式(3)~式(6)对时间求一阶导数,并写成矩阵形式,即得到以下速度矩阵
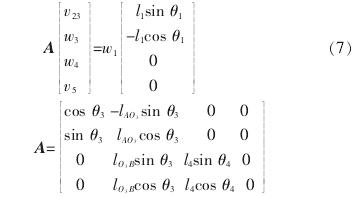
通过式(7)可得到刀具的速度 v5和构件 2 的相对速度 v23,构件 3 的角速度 w3和构件 4 的角速度 w4。(3)加速度分析对式
(7)对时间求一阶导数,便得到加速度矩阵
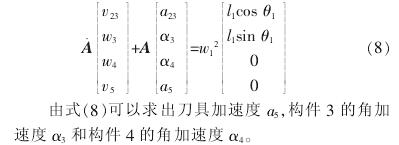
表 1 机构尺寸及构件重量

插床导杆机构中的滑块的运动即是插床中刀具的运动,导杆机构尺寸及各构件重量如表 1 所示,利用 MATLAB 软件计算得到滑块的运动学分析曲线如图 2 所示,得到刀具的速度最大为-0.204 m/s(负号表示方向向上),加速度最大为+0.613 m/s2(正号表示与此时速度方向相同)。 刀具在变速运动中产生的加速度会引起惯性力,在刀具加工过程中,此惯性力对刀具产生柔性冲击,因此在刀具的选择上还要考虑到柔性冲击的影响。
2 、插床导杆机构的动力学分析
插床对工件进行切削加工,其对力的要求相对较高,同时机构的约束反力是进行强度分析的基础。由导杆机构的运动学分析得到各构件的相关构件质心角速度和加速度,可求出构件 3 和构件 5 的惯性力F13和惯性力偶矩 M15。
在用矩阵法对导杆机构进行分析时,通过建立以 O2为原点的平面直角坐标系,然后分别对各个构件列出力平衡方程,对于构件导杆机构中任一活动构件 i,都列出 3 个力平衡方程式,因此导杆机构可列出 15 个力平衡方程式,得到各运动副的约束反力如图 3 所示。
由图 3 可以分析出,当切削阻力发生变化时,各铰支座约束力也会发生迅速变化,切削阻力延 Y 轴正方向,因此各铰支座 Y 轴分力相对于 X 轴分力更大。

图 2 滑块的运动学分析曲线图

图 3运动副反力曲线1. FCx2. FCy
3 、利用动能定理求解平衡力矩
由于在一个工作循环中,刀具受力变化将引起主轴的速率波动,需要用飞轮调速,减小电机容量和提高切削质量。 平衡力矩是选用飞轮转动惯量的重要依据。 本文利用动能定理求解,可避免对于各约束反力求解,简化计算过程。该导杆机构的运动方程式为
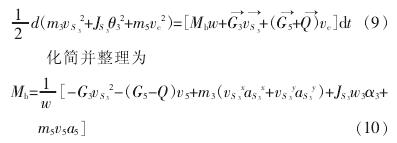
运用动能定理求解平衡力矩不需要展开为矩阵,进行复杂的运算,可以直接带入 MATLAB 程序中,得到相应的数据结果。 其平衡力矩Mb曲线图如图 4 所示。
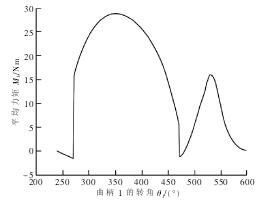
图 4平衡力矩曲线图
由图 4 可以分析出,当切削阻力变化时,平衡力矩也会发生迅速变化。 其中平衡力矩最大值为28.88 Nm,最小值为-1.43 Nm。
4 、结语
为得到插床导杆机构运动学和动力学规律,本文首先对插床导杆机构进行运动学分析和动力学分析,建立其矢量模型,然后利用 MATLAB 软件的矩阵运算功能,获得其运动和动力特性,并将结果可视化,获得插刀的位移、速度、加速度、以及各构件的约束反力随原动件转动角度变化的规律,最后,利用动能定理求出平衡力矩。 上述分析方法为插床导杆机构的优化设计奠定理论基础,同时也为其他连杆机构进行运动学和动力学分析提供了很好的借鉴。
投稿箱:
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com
更多相关信息
- target=_blank> 基于传感器的热误差补偿技术
- target=_blank>数控铣床铣螺纹浅析
- target=_blank>山高刀具宣布推出用于不锈钢车削的新型 Duratomic® TM 材质等级
- target=_blank>卧式五轴加工中心钛合金件加工工艺的设计
- target=_blank>VMC 450-5 MT 车铣中心——五轴机床显著缩短重型切削加工过程
名企推荐







