
“巧手机器人”实现33种抓握动作,还能双面抓握、自主爬行
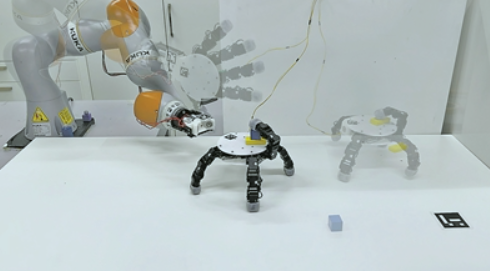
“巧手机器人”可从机械臂上分离,爬行拾取多个物体并重新与机械臂连接。图片来源:EPFL
据《自然·通讯》20日发表的研究,一种“巧手机器人”不但能够复现人类手部的33种抓握动作,还升级成具备双面抓握与自主爬行能力的“高级手”。这一由洛桑联邦理工学院(EPFL)研发的可拆卸机械手,能抓取超出常规尺寸范围的物体,并能连续处理多个目标,在工业自动化、服务协助及野外勘探等领域具有极大应用价值。
在机器人学领域,机械手的设计长期受到人类手部结构的启发。尽管人手极为灵巧,但受到非对称形态与单面抓握的物理局限,限制了其在狭窄空间作业、多物体同步操作等场景下的效能。为突破这些限制,工程师近年来不断探索对称结构、模块化及可重构的机械手设计方案。
在这项工作中,团队开发了两种对称结构的机械手:五指版本与六指版本,手掌直径均为16厘米。对称设计使其能够从双面进行抓握,显著增强了操作的灵活性与适应性。该机械手的另一个突出特点是可与机械臂基座分离,通过内置驱动实现自主爬行移动。
研究团队演示了“巧手机器人”连续抓取最多3个不同物体的能力,并能在抓持物体的状态下,稳定地重新与机械臂对接。实验显示,该设备能够可靠抓取多种日常物品,如卷筒芯、橡胶笔、罐头与橡胶球,并能复现人类手部的数十种典型抓握姿态,最大负载可达2公斤。
这类可脱离基座、具备移动能力的机械手,代表了一种向“机器人即服务”及柔性制造系统演进的技术方向。其可拆卸与重新配置的特性,为在复杂、非结构化环境中执行任务提供了新思路,例如在灾难救援中进入废墟缝隙进行操作,或在仓储物流中同时处理多个异形包裹。未来的研究可进一步探索其在动态环境中的自主决策与协同作业能力,推动机器人系统向更智能、更适应多变场景的方向发展。
(原标题为《复现并升级人类手部动作,“巧手机器人”实现双面抓握与自主爬行》)
来源: 澎湃新闻
投稿箱:
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com
更多相关信息
- target=_blank>FIBRO转台重磅推出面向国际市场的OrangeTables系列
- target=_blank> 小而不凡,超乎所见 博世力士乐VFC 3220系列变频器致新上市
- target=_blank>10亿元!聊城新签约一只低空经济高端轴承产业基金
- target=_blank>AI重塑用户体验,海尔总计13座灯塔工厂领航中国智造
- target=_blank>华旋传感获产业资本加持,加速人形机器人等高精度传感器研发落地
名企推荐







