



基于意识任务的机器人脑控系统
2017-8-2 来源:西北工业大学 作者:谢松云,段绪,冯怀北,孟雅,陈刚
摘要: 目前机器人的控制系统基本需要双手遥控,对残疾人等无法提供便利,提出了一种全新的脑电信号( electroencephalography,EEG) 控制机器人方法。采用无需外界刺激的意识任务诱发特征EEG,通过便携式脑电设备采集 EEG,经过特征提取与指令分类,实现对机器人的控制。针对意识任务需要被试进行大量的训练,设计了离线训练系统。针对 EEG 信噪比较低的问题,研究了意识任务下EEG 处理方法。最后设计了在线机器人脑控系统,利用想象左手运动、想象右手运动、想象单词生成分别控制机器人左转、右转与前进,利用眨眼信号控制机器人停止。实验结果表明,从准确率、舒适度两方面来看,基于意识任务的机器人脑控系统有效实现了机器人的控制。
关键词: 脑控系统; 机器人控制; Emotiv Epoc; 意识任务; LTCFB-CSP 算法
脑控系统的核心是脑机接口( brain computer in-terface,BCI) 技术,是测量中枢神经系统的活动并将它转换成用来代替和增强中枢神经系统输出的人工输出系统。基于 EEG 的 BCI 技术应用最为广泛。BCI 分为主动式 BCI 与被动式 BCI。被动式 BCI 通过收集大脑以及其他生理信号来解析认知与心理精神状态,通常运用在高危以及需要注意力长时间集中的地方。主动式 BCI 通过安装在头皮固定位置处的电极,检测到相应的神经元活动弥散到头皮上的电势分布,然后解读电势信号的分布,解码一些运动意图信息,将这些运动意图信息相应编码,就可以控制外部的设备,为人们提供一种全新的与外界交互的能力。主动式 BCI 最常用于残疾人辅助设备,如脑控轮椅、脑控义肢、通过 EEG 控制经颅磁刺激对受损的肌肉进行康复治疗与残疾人辅助机器人等。目前,让 BCI 新技术走出实验室,服务广大有需求的患者和特殊的人群成为 BCI 研究的新挑战[1]。
想象运动与想象单词生成都是意识任务的一种。想象运动表示有意识的想象一个运动意图。可以在没有外界刺激的情况下诱发出事件相关同步 /去同步特征波。被试在一段时间内根据提示的首字母拼写一连串单词,拼写的过程是由几个不同的脑区同时作用的结果。如拼写单词“top”时,颞叶语言区、额叶中回区和视觉区等大脑相应区域会被激活,这就是想象单词生成所解码的特征波[2]。根据以上研究背景,本文首先给出脑控系统的总体方案,包括离线训练阶段与在线系统设计; 利用功率谱估计与表面拉普拉斯拓扑图证明了意识任务下 EEG 的特征; 再对 EEG 处理方法进行研究; 最后通过在线实验评估了系统的性能,使被试利用想象运动、想象单词生成等意识任务分别控制机器人的不同动作。
1.基于意识任务的机器人脑控系统的总体方案
基于意识任务的机器人脑控系统分为离线训练阶段与在线机器人控制阶段。利用想象左手运动、想象右手运动、想象单词生成等分别控制机器人左转、右转与前进。在训练阶段通过特定的实验范式与结果反馈使被试诱发出的意识任务特征 EEG 更加稳定与准确,训练完成后对离线数据进行处理,计算出每个被试特定的空间滤波器投影矩阵与分类器模型。在线实验阶段,在 BCI2000 平台的基础上配置各个模块,设计实验并完成对机器人的控制。系统的总体方案示意流程如图 1 所示。
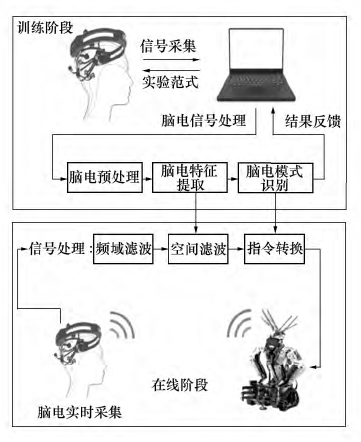
图 1 基于意识任务的机器人脑控系统
1.1 离线训练阶段
实验范式如图 2 所示[3],被试听到“beep”提示音后,提示一个实验试次的开始,过 2 s 会听到随机出现的“lefthand”来提示被试想象左手运动、“right-hand”来提示想象右手运动,或提示要拼写单词的首字母的声音,这时被试开始执行意识任务,任务持续时间为 4 s,紧接着为 4 s 试次间休息。需要注意的是,当被试听到“beep”提示音后须集中注意力,身体各部分不能动,当任务提示声响起时被试不能眨眼。实验共包含 60 个试次,每种任务出现 20 次。每次任务结束时屏幕上会出现“YES”或“NO”的反馈,“YES”代表想象正确,“NO”代表想象错误。当被试的训练正确率达到 70%以上时,训练结束,带事件标签的 EEG 数据被保存在计算机中。接着用离线数据中执行任务的部分做离线分析。首先分析意识任务下 EEG 的特征。在初级感觉运动皮层不处理感觉信息或运动输出时,会表现出一种大约 8~12 Hz 频率与 18~25 Hz 频率的节律性运动,这种运动被称为 μ 节律与 β 节律。当单边
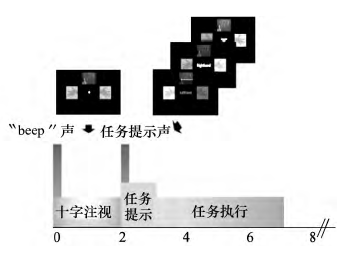
图 2 训练阶段的实验范式
肢体运动或想象运动时,对侧初级感觉运动皮层区域活跃起来,μ 与 β 频率的节律性活动表现为幅度的降低,称为事件相关去同步( event-related desyn-chronization,ERD) ; 反之,其同侧皮层区域受到抑制,μ 与 β 频率的节律性活动表现为幅度升高,称为事件相关同步( event-related synchronization,ERS) 。想象运动因为其较明显的 ERD/ERS 现象被用在BCI 技术中。想象单词生成时,不同脑区的激活在特征上表现为相应脑区 α 频段的升高[4]。
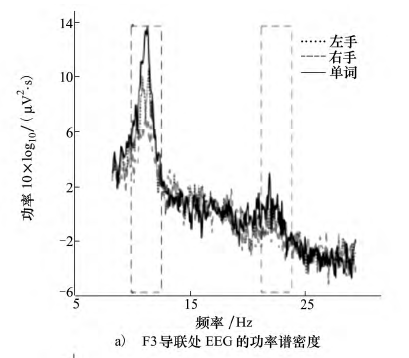
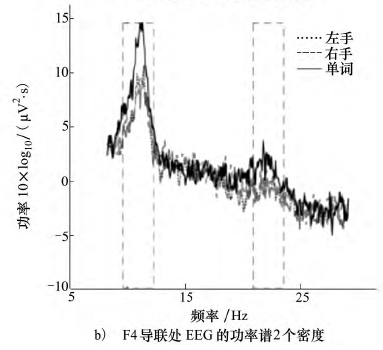
图 3 3 种任务下 2 个导联处 EEG 的功率谱密度
利用离线数据计算 3 类意识任务的功率谱估计,如图 3 所示,被试在单词意识任务下 α 节律的功率远高于其他 2 种任务。在大脑左半球 F3 导联处,被试想象左手运动时 μ 节律与 β 节律的功率都略高于想象右手运动。在大脑右半球 F4 导联处,μ 节律与 β 节律的功率表现两者正好相反。图 4 为被试想象运动时的表面拉普拉斯 ERD 拓扑图,每个图代表4 s 脑电信号的平均值,当进行一侧手部想象运动时,对侧初级感觉运动区域出现 ERD 现象。以上分析证明了本文采用的 Emotiv Epoc 作为便携式采集设备的可行性。
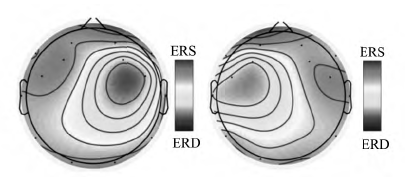
图 4 左手想象运动( 左) 与右手想象运动( 右) 的 ERD 拓扑图
1.2 在线机器人脑控系统设计
如图 1 中在线阶段所示,系统中硬件包括脑电采集设备 Emotiv Epoc,一台笔记本电脑,以及一个乐高机器人。软件包括 BCI2000 与 MATLAB。整个系统由脑电设备采集信号,笔记本电脑处理信号并输出指令控制机器人运动。由 BCI2000 平台完成信号接收、信号处理和应用驱动之间的通信。BCI2000包括以下 3 个模块。
1) 数据采集模块: 将 Emotiv Epoc 记录的信号经过预处理后打包传递给信号处理模块。信号的导联数目为 14,每次发送的数据包长度设置为 3 s。每段数据都经过 1~70 Hz 带通滤波器与 50 Hz 陷波滤波器去除工频干扰。
2) 数据处理模块: 此模块通过调用 MATLAB 脚本来执行。将训练阶段训练好的投影矩阵 W 与分类器模型传递给在线处理过程。在线脑电数据首先经过带通滤波器组,再通过空间滤波器 W,对滤波后数据按维度求方差,最后通过分类器模型进行在线分类,处理过程运算时间约 1.5 s,完全可以在下一个数据包到来之前完成运算。
3) 机器人模块: 将数据处理模块输出的指令通过机器人 MATLAB 工具包编程转换,转换后的指令通过 WIFI 传递给机器人,控制机器人进行动作。预设机器人直线行走速度为 0.2 m/s,并预设路线。包含 8 个左转弯、8 个右转弯、3 次停止与 3 次直线行走。
2.基于意识任务的脑电信号处理方法
的研究与实现意识任务下特征 EEG 的特征提取与模式识别算法的优劣直接影响了机器人脑控系统的性能。算法部分采用离线训练所得数据进行研究,并将算法运用于在线脑控系统中,每个被试都需要用离线数据计算出特定的算法参数。意识任 务 下 特 征 EEG 的 特 征 提 取 方 法 有Pwelch 功率谱估计分类方法、空间滤波器方法、交叉 相 关 方 法 等。 共 空 间 模 式 (common spatialpattern,CSP ) 是一种空间滤波器,用 CSP 方法可以从多导联脑电信号中计算出头皮的特定激活区[5]。它被证明在分类想象运动时有很好的分类效果。本文将基于局部时间相关的滤波器组共空间模式算法( local temporal correlation based filter bank commonspatial pattern,LTCFB-CSP ) 运用在 3 种任务的特征提取中。方案流程图如图 5 所示,具体步骤如下:
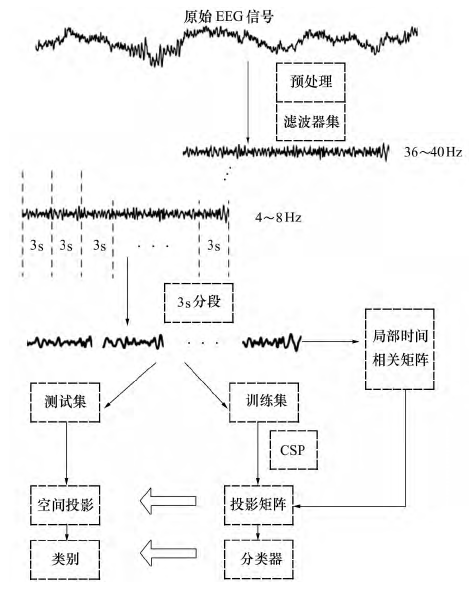
图 5 意识任务下特征 EEG 的信号处理方法
第 1 步 预处理。使用 EEGLAB 工具包对数据进行预处理,包括坏导联去除与去伪迹两步,设计9 个切比雪夫Ⅱ型滤波器将整段数据滤波后得到 9段子信号,滤波器参数为最优化参数,对每个子信号的 2~12 个采样点内脑电数据求相关。
第 2 步 特征提取。打乱试次间顺序,70%作为训练集,30%作为测试集; 采用成对组合方法将三分类问题转化为二分类问题后通过共空间模式方法求出投影矩阵,将脑电信号投影到维数为 6 的空间中,并构造出特征矩阵。
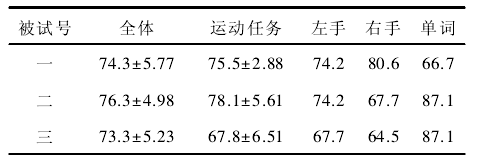
第 3 步 指令分类。采用支持向量机作为分类器,核函数选择线性核函数。对线性核函数中的惩罚因子 c 参数进行优化。如表 1 所示,最终的分类结果经过 10 次随机交叉验证得出。
表 1 3 类意识任务的最终分类准确率 /%
将 LTCFB-CSP 算法与其他 3 种 CSP 改进算法FBCSP 、LTCCSP 、RCSP-A 比较,结果如图 6 所示,可见就分类准确率而言,LTCFB-CSP 算法有更优越的性能[5-6]。
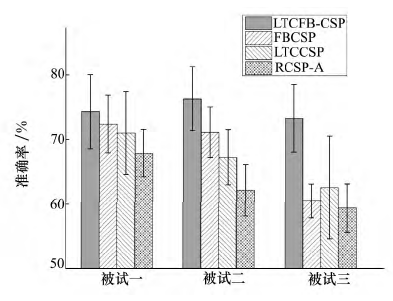
图 6 不同算法对意识任务下特征 EEG 的分类结果
3.机器人脑控系统实现与在线实验结果
如图 7 所示,实验场所为室内 3 m×4 m 空地中,实验选择晚上相对安静的环境。实验前给被试佩戴 Emotiv Epoc 脑电帽,信号采样率设为 128 Hz,参考电极为左侧乳突。让被试舒适地坐在椅子上,要求被试熟悉机器人的行走路线并记住指令的顺序。选择经过训练后的一名被试进行在线实验,被试性别男,年龄 24 岁,视力通过佩戴眼镜矫正至正常视力。启动 BCI2000 平台,配置好相关参数后开始实验。实验过程中,被试通过意识任务与眨眼肌电信号控制机器人绕过障碍物,走完预定路线。根据 4 次实验测试验证,本系统基本能有效地控制机器人完成预设的路线。
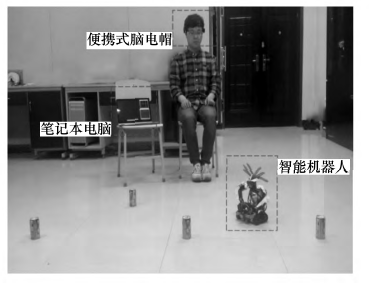
图 7 基于脑机接口的机器人系统实验实例
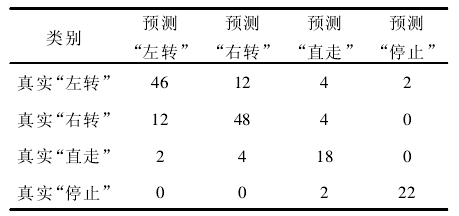
1) 准确率。Kappa = ( acc-1 / N) / ( 1 - 1 / N) 。acc代表指令执行的正确率,N 表示要分类的特征脑电类别数。如表 2 所示,实验一共进行了 8 次。其中“左转”指令一共执行了 64 次,正确 46 次; “右转”指令一共执行了 64 次,正确 48 次,“直走”指令执行了 24 次,正确 18 次; “停止”指令执行了 24 次,正确 22 次。每种指令的正确率分别为 71.8%、75%、75%、91. 7%。4 个指令的平均准确率为 78. 3%,Kappa = 0.71。3 类意识任务控制指令的平均准确率为 73.9%。
表 2 在线实验中每个指令的分类结果
2) 舒适度。实验结束后,根据被试的实验反馈,表示训练阶段时间适中,无需视觉刺激; 在线实验阶段脑电帽较舒适,意识任务与机器人的真实运动较类似,容易想象。因此本论文搭建的脑机接口系统舒适度高。
4.结论
针对脑机接口中脑电设备的便携问题与脑机接口系统的实用性问题,证明了意识任务下 EEG 具有较明显的特征,研究了特征 EEG 处理方法并将该方法运用于在线机器人脑控系统中,设计了基于意识任务的便携式机器人脑控系统,最后搭建在线系统的各个模块,设计并完成实验。机器人脑控系统准确率达到了 78.3%,响应时间控制在 3 s,被试通过意识任务绕过障碍物,完成预设的路线。
投稿箱:
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com

