



基于 PMAC 的马鞍形焊缝焊机数控系统研究
2020-8-19 来源:燕山大学机械工程学院 、继续教育学院 作者:李宇鹏 郭超峰 孙洪胜
摘要: 基于 PMAC 运动控制卡开发了马鞍形焊缝焊机数控系统。首先,构建了数控系统硬件结构。然后,针对接管与筒体焊接前存在变形、安装误差等复杂情况,提出采用马鞍形曲线直接插补和在线示教方式相结合的轨迹规划策略。MATLAB 仿真结果表明,该策略很好地实现了对焊枪运动轨迹的控制。最后,基于模块化设计理念开发了数控系统软件,其功能完善,运行稳定,实现了对马鞍形焊缝焊机的控制。
在石油、化工、核电等行业压力容器的制造中,广泛存在接管与筒体相贯形成的马鞍形焊缝的焊接[1]。由于相贯线是复杂空间曲线,采用人工或半自动设备焊接时生产效率低、焊接质量不稳定,产品可靠性差;采用通用的机器人进行焊接时,价格昂贵且编程难度大[2]。因此,越来越多地采用马鞍形焊缝自动焊机。由当前市场上主流的日本 FANUC、德国 SINUMERIK 等CNC 系统,不具备马鞍形曲线直接插补算法,且其硬件和软件的封闭性较强,很难对其进行功能扩展。
目前大多采用直线或圆弧插补方法实现马鞍形曲线焊缝的焊接,存在编程难度大、线速度不均匀焊接质量差等问题。开放式数控系统具有可移植性可扩展性、相互操作性等特点,已成为当前CN发展的必然趋势[3]。
本文根据马鞍形焊缝焊机的功能特点和压力容器接管焊接工艺技术要求,提出采用马鞍形曲线直接插补算法和示教相结合的轨迹规划策略,基于 PMAC 运动控制卡构建马鞍形焊缝焊机数控系统硬件结构,并采用模块化设计理念开发数控系统软件。
1 、硬件结构
1. 1 马鞍形焊缝焊机结构
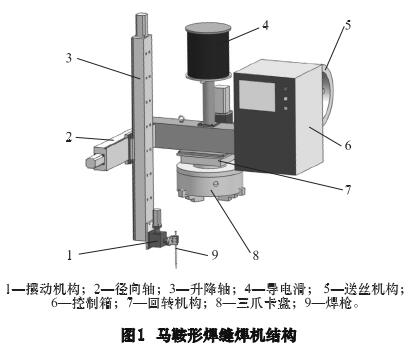
马鞍形焊缝焊机结构如图 1 所示,焊机主体部分由回转轴、径向轴、升降轴和摆动轴构成。焊接机的回转运动是由伺服电动机通过大减速比减速器,带动整个箱体绕静止的主轴转动。三爪卡盘通过法兰盘和主轴相连接。径向轴和升降轴采用两个直线模组组合成的十字滑台。
焊枪摆动机构采用蜗杆蜗轮减速器,结构更为紧凑,精度更高。在接管和筒体通过手工打底焊固定后,通过三爪卡盘将马鞍形焊缝焊机锚固在接管内壁上,通过升降轴和回转轴的联合运动完成接管马鞍形焊缝的焊接。为了实现高的定位精度和运动平稳性,4 个轴的电动机都采用交流伺服电动机,并配以相应的伺服驱动器驱动。
1. 2 马鞍形焊缝焊机数控系统硬件结构
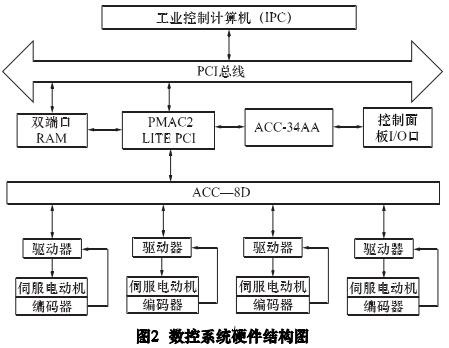
根据马鞍形焊缝焊接对控制系统的要求,采用“工控机+运动控制卡”的上、下位机结构形式构建的数控系统硬件结构如图 2 所示。
上位机选用研华公司高性能 IPC-610H 工控机,下位机选用 PMAC2 LITEPCI 运动控制卡,将 PMAC 运动控制卡插入工控机的总线插槽中实现 PMAC 和工控机的连接,通过 PCI 总线和双端口
RAM 两种方式实现工控机与 PMAC 的通讯。PMAC 与焊机的 I/O 端口通过 ACC-34AA 接口板连接,用户通过自行设计 PLC 程序,可实现对送丝机、焊接电源等开关量的控制。
采用 ACC-8D 端子板连接运动控制卡和驱动器,实现各个运动轴的伺服闭环控制。
2 、马鞍形曲线插补算法
插补算法是数控系统的核心,它不仅决定着数控系统的插补精度,还对数控加工编程的复杂程度有影响。依据马鞍形曲线焊缝的特点和压力容器焊接工艺要求,焊枪保持既定位姿条件下,通过回转轴和升降轴的联动就能够实现马鞍形曲线焊缝的焊接[4]。
采用马鞍形曲线直接插补算法,用户只需要输入简单的几何参数就能够自动规划出焊枪的运动轨迹[5]。但实际上,由于接管定位不准确或者筒体变形等原因造成马鞍形曲线直接插补算法难以满足高质量焊接要求。如果单纯采用示教方式,不仅示教点多而且每个接管的焊接都需要示教,导致示教难度大、效率低。
针对马鞍形曲线焊接的复杂情况,本文提出采用马鞍形曲线直接插补与在线示教方式相结合的轨迹规划策略,对于偏离标准马鞍形曲线的部分焊缝,进行人工在线示教方式,既解决了直接插补时灵活性差,又解决了单独采用示教规划时效率低、难度大等难题。
2. 1 马鞍形曲线直接插补算法
设马鞍形曲线的参数方程为:
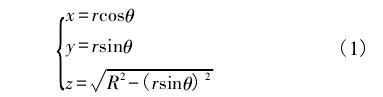
式中: R 为筒体半径; r 为接管半径; θ 为旋转角度。如果保持回转轴的角速度恒定,即每个插补周期T 内步进角 Δθ 恒定,则焊枪末端线速度不断变化,不利于焊缝成形,易产生焊接缺陷,影响工件使用寿命。因此,要实时地调整步进角 Δθ 的大小使焊枪末端线速度保持恒定[5]。
如图 3 所示,马鞍形曲线上任意一点 Q,过点 Q 分别与接管、筒体外表面相切的平面为 α和 β,平面 α 和 β 相交于直线 l,则过该点的线速度 v的方向为直线 l 的方向向量,Q 点线速度方向与 Z 轴的夹角为 γ。由于在一个插补周期 T 内,旋转角 θ 的增量 Δθ 很小,对应的曲线都可以近似成直线段,从而得到:
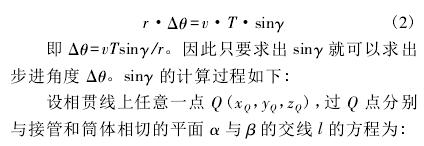
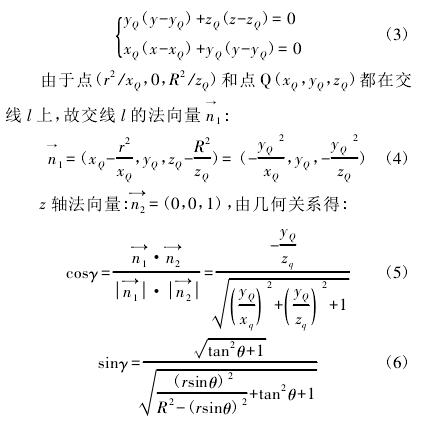
将式( 6) 代入式( 2) 可求出恒定焊接速度 v 时步进角度 Δθ,再由式( 1) 可得升降轴的进给量 Δz。
2. 2 示教方式轨迹规划与插补算法
目前,NURBS 曲线已成为工程制造领域流行的自由曲线表达方法。但 NURBS 曲线的表达式比较复杂,在反求控制顶点时计算量大,且当权因子选取不当时会引起畸变[6]。B 样条曲线相比
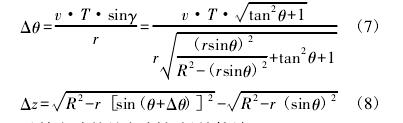
NURBS 曲线不仅能够满足一般工程问题的要求,而且表达式更为简单。其中,三次均匀 B 样线条曲线在分段连接点处是 C2连续的,故其在工程设计中应用最广。三次均匀 B 样线条曲线的数学表达式为:
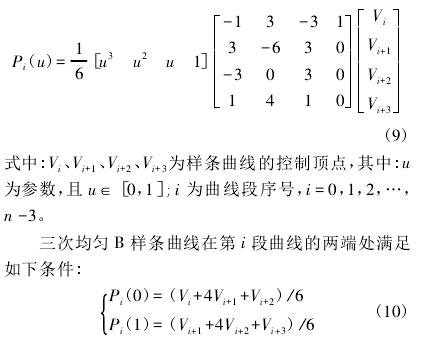
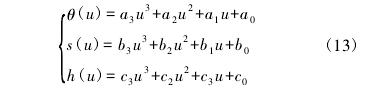
由于在示教起始点和结束点的线速度为已知,故可得两个约束条件:
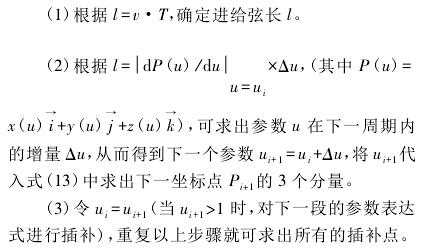
通过示教可以得到焊机各个运动轴的运动量构成的示教点( θ,s,h) ,由式( 12) 可求出所有的特征点,再将求出的特征点代入式( 9) ,可以得到各个运动轴的参数表达式:
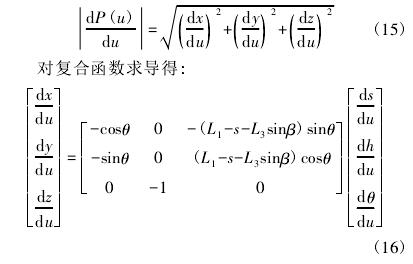
当前,三次 B 样条插补算法可分为: 等参数插补算法、恒速度插补算法、基于精度要求的插补算法、基于加速度要求的插补算法和基于精度和加速度要求的插补算法 5 种类型[6]。为实现焊接速度的恒定需求,本文采用恒速度的三次均匀 B 样条插补算法。其计算步骤如下:
要求出 d P( u) /du 的值,需要知道焊接位置点在笛卡尔坐标系下的表达式。由于本课题中有旋转轴和摆动轴,且各个运动轴的参数表达式不是在笛卡尔坐标系下求出的,需要将其转换到笛卡尔坐标系下才能求出 d P( u) /du 。以下说明求解 d P( u) /du 的基本过程。
焊机复位后,升降轴线和摆动轴线的交点 A 到焊机旋转轴线的距离为 L1,到焊机坐标系 XoOoYo面的距离为 L2,摆动杆长为 L3。
根据马鞍形焊缝焊机的结构特点,以回转主轴轴线和减速器底面的交点为焊机坐标系原点 Oo,建立焊机坐标系 Oo- XoYoZo,如图 4 所示。
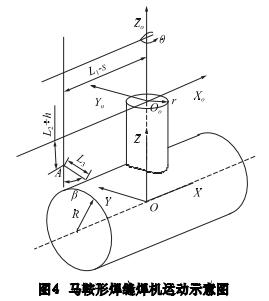
与焊机复位时相比,焊机各个运动轴的运动情况如下: 旋转轴从 X 轴正向开始按逆时针方向绕 Z 轴的旋转角度为 θ,径向轴沿 X 轴的移动距离为 s,摆动轴的摆动角度为 β。设焊枪末端点在焊机坐标系中的位置为( x,y,z) ,则其表达式为:
由于 x、y、z 都是关于 s、h、θ 的表达式,且 s、h、θ 又都是关于参数 u 的表达式,故可得:
将式( 16) 代入式( 15) 可得 d P( u) /du。若接管半径 r = 250 mm,筒体半径 R = 800 mm,插补周期 T =0. 02 s,焊接速度 v = 10 mm / s、L1= 400 mm、L2= 100mm、摆动杆 L3= 100 mm、摆杆夹角 β = 4°。
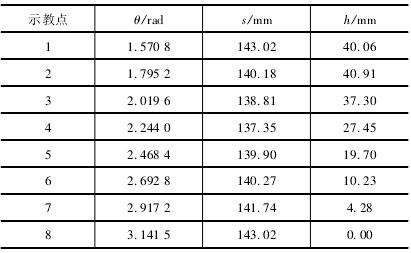
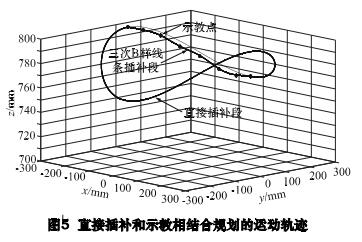
焊接前在试运行模式下,根据实际情况对焊枪进行调整,得到的示教点如表 1 所示。通过 MATLAB 仿真得到的马鞍形曲线直接插补和示教方式规划的焊枪运动轨迹,如图 5 所示。
由图可知,直接插补段插补结果是马鞍形曲线的一部分,示教编程段规划出的运动轨迹是一条光滑的曲线,其与直接插补段连接处过渡平滑,证实了该轨迹规划策略的合理性和可行性。
表 1 示教点
3 、数控系统软件开发
本文选用 WINDOWS XP 为数控系统软件开发平台,采用 VC + + 6. 0 开发工具,通过调用 PCOMM32. DLL 动态链接库实现工控机和 PMAC 卡之间的通讯,依据马鞍形焊缝焊接对焊机的功能要求,基于模块化设计理念开发数控系统软件,并借助 PEWIN 软件对 PMAC 卡中相应参数进行设置,系统软件结构如图 6 所示。
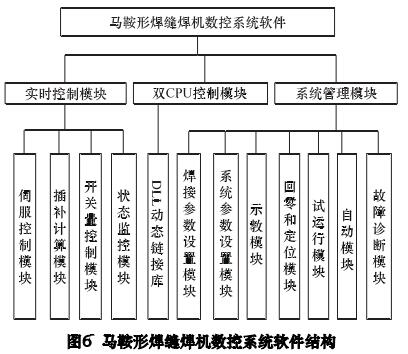
3. 1 系统实时控制模块
实时控制模块是在 PMAC 卡固有的模块基础上进行的功能模块开发,主要包括: 插补计算模块、伺服控制模块、开关量控制模块和状态监控模块。
( 1) 插补计算模块。该模块的任务是在一定焊接速度和精度要求的前提下,按照预处理算法计算出焊枪的运动轨迹,再生成各个轴运动指令。
本文采用数据采样法插补思想,由上位机完成粗插补、下位机完成实时精插补。粗插补采用马鞍形曲线直接插补算法或三次均匀 B 样条插补算法,精插补采用 PMAC 卡提供的 SPLINE1 模式,该模式采用 S 型曲线加减速,在区段交界处速度和加速度没有突变[7]。
( 2) 伺服控制模块。
由 PMAC 运动控制卡完成位置闭环,伺服驱动器完成电流和速度这两个闭环的控制。采用 PMAC 卡为用户提供的“PID+速度/加速度前馈+NOTCH 滤波”的控制算法。
( 3) 开关量控制模块。
该模块主要完成对马鞍形焊缝焊机的开关量的控制,包括焊接电源开关,送丝机开关,限位开关等,需要用户为用到的 PMAC 卡中的每个 I/O 口定义一个 M 类变量,编写相应的 PLC 程序可实现对焊机的逻辑顺序控制。
( 4) 状态监控模块。
该模块主要是实时地检测运动控制卡的状态和电动机的状态、位置、速度等信息,并通过双端口 RAM 实现 PMAC 卡和工控机的通信。
3. 2 系统管理模块
系统管理模块是数控系统软件中非常重要的组成部分,主要实现系统初始化参数设置、焊接参数设置、手动操作、自动定位、故障诊断、加工运行等功能。
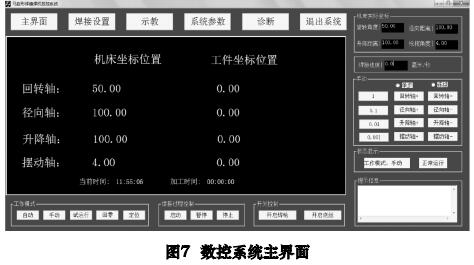
( 1) 系统主控模块。
主控模块要为操作者提供一个直观的、友好的操作环境。主控模块应包含系统控制所需的所有控制按钮和设定选择栏,而且要方便用户操作。主模块主要包括系统参数设置、焊接参数设置、手动操作、诊断、启动和停止等按钮。开发的马鞍形焊缝焊机数控系统主界面如图 7 所示。
( 2) 焊接参数设置模块。
通过对焊接工件尺寸、坡口尺寸以及焊丝直径等焊接工艺参数的设置,通过调用多层多道焊接路径规划模块[8],计算出各个焊道的位置,每焊完一道焊缝,将焊枪进行一定的偏移,实
现多层多道连续自动焊接。
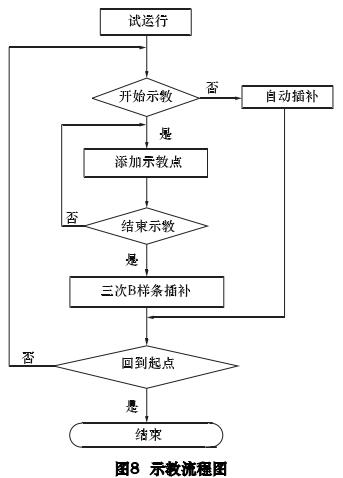
( 3) 示教模块。
将焊枪调整到焊接起始点,并进入试运行模式,当焊枪偏离标准马鞍形曲线时,及时按下“暂停”按钮,进行人工示教规划焊枪运动轨迹。示教流程如图 8 所示。
4 、结语
本文根据马鞍形焊缝焊接的特点和高质量焊接要求,基于 PMAC 运动控制卡开发了马鞍形焊缝焊机数控系统。提出的马鞍形曲线直接插补算法和示教相结合的轨迹规划策略,能有效地控制焊枪的运动轨迹,且具有较高的轨迹精度。基于模块化设计理念 在Window 平台下采用 VC + + 编程语言开发了数控系统软件,经调试运行表明该系统性能良好,运行稳定,操作简单,实现了对马鞍形焊缝焊机的控制,满足了压力容器中接管与筒体的高质量焊接要求。
投稿箱:
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com
更多相关信息

