


车床丝光杠机动托架
2016-11-14 来源:兰州兰石能源装备工程研究院有限公司 作者:张海强 宋杰
摘要:确定机架和活动构件数及组成运动副两构件间的相对运动特性。
关键词:定位准确;安全可靠;高效
在现代金属切削机床中,工作台(溜板箱)进给中,常常由于机床丝杠和光杠(以下简称两杠)因其自重而产生弯曲变形,从而影响机床的加工精度以及产生爬行等现象。统计资料表明,当两杠长度为5 m时,因其弯曲变形而产生的下垂量约为6 mm;当两杠长度为8 m时,因其弯曲变形而产生的下垂量约为12 mm。两杠弯曲变形,不仅影响传递运动的精度和平稳性,而且对机床的使用寿命也十分不利,是产品设计中不容忽视的重要因素。为了解决这一问题,须在两杠下部适当部位增加辅助支撑以提高其刚度。辅助支撑有多种形式,如:手动托架、随动托架和机动托架。其中以机动托架为最佳,它能在溜板箱接近时自动地脱开两杠,缩进机床床身内,当溜板箱远离后又自动地伸出并重新托住两杠,整个过程完全自动,既保证了运动的性能,又减轻了操作者的劳动强度。因此,机动托架在长规格卧式车床上得到了广泛的应用。
1.托瓦运动轨迹
根据机动托架功能,托架上托瓦的运动轨迹如图1所示。

其中:4一B,托瓦下降脱开两杠;B_c,托瓦缩进床身内。当溜板箱远离托架一定距离后,托瓦的运动轨迹与上述相反,即:C’一B’,托瓦伸出床身外;曰’一A’,托瓦上升托住两杠。当曰7一A’托瓦上升复位后,托瓦重新托住两杠。由于运动轨迹有一个明显的转折,故一般的四连杆机构(平面)不易实现,我公司大型产品上的机动托架为一个六连杆机构,如图2所示。
(1)托瓦下降
托架动作过程,选定构件1为主动(起始)构件,当其向右移动时,如设法使构件5不动,则构件2必然顺时针旋转,构件3逆时针旋转,构件4以D为中心逆时针旋转,使E转到E’位置,即由实线位置移至虚线位置,如图2a所示,即实现了托瓦下降,脱开两杠。

图2托架机构运动原理图
(2)托瓦缩进
当构件1继续向右移动并推动构件2沿顺时针继续转动时,迫使构件3与构件4合为一体,此时构件便由六连杆转化为五连杆,构成一个四连杆基本杆组,如适当选取各构件的长度(使其成为一个平行四连杆机构),即可实现托瓦的后退,缩到床身内适当位置,如图2b所示。
2.托架设计要点
我们知道,要使平面连杆机构按正确的运动规律动作,其充分必要的条件是在全部运动过程中机构的自由度数与起始构件(主动件)数相等。对此机构来说,起始构件数为1个,所以在整个过程中,其自由度数必须始终保持1。为了实现托瓦下降及后退的轨迹,机构在运动中存在一个由六连杆转化为五连杆机构的过程,所以必须设计这样一种约束。它只在机构运动过程中的某一部分起约束作用,而在另一部分应失去约束作用,以使运动全过程中机构的自由度始终保持为l,从而确保运动的准确、可靠。
3.机动托架工作原理
本机动托架安装在床身上,并由安装在溜板箱下面的控制板7(如图3)来控制托瓦的下降离开两杠,或上升托住两杠。当轴1向右移动时,使托瓦下降并缩进床身内;当溜板箱移过机动托架后,轴1向左移动,使托瓦伸出床身并上升托住两杠。我公司大型卧式车床上所采用的伸缩式机动托架,经过不断改进和多年使用,实践证明,这种托架是目前较为理想的一种结构,其工作原理如图3所示。大拖板在运动过程中,当溜板箱接近两杠托架时,固定在溜板箱上的控制板7,首先触动滚子2,使轴1向右移动。此时,机构为一平面六连杆机构,其中轴1、连杆3、连杆4、托架5、连杆9为5个活动构件,相当于图2a中构件l、2、3、4、5。即A、B、C、D、E、F为6个平面低副,G点为一高副。撞块6固定在托架5上(可调),螺栓8和lO固定在床身上,螺栓8只限制撞块6,同时也限制托架5水平向右移动,而螺栓10只限制连杆9水平向左移动。因此,撞块6、螺栓8和10共同构成了一个高副,限制了机构水平方向的一个自由度。所以,机构的自由度为:
此时,当轴1推动连杆3,使其顺时针转动时,连杆9不动,所以,连杆4逆时针转动,托架5逆时针转动,实现了托瓦的下降,脱开两杠。在托架5上设计有
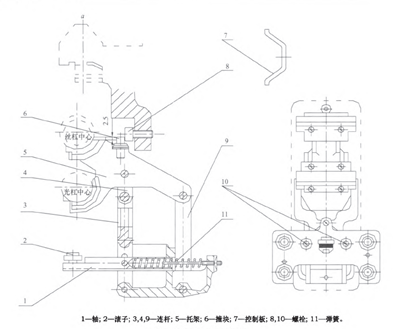
图3机动拖架工作原理图
一小凸台,通过计算,使其位置满足这样的条件:当托瓦脱开两杠时,撞块6有3.2 mm以上下降量,这时,使连杆4相对于托架5不可能继续转动,而视为一体,机构则转化为五连杆机构,活动构件数为4个,即轴1、连杆3、连杆4(或托架5)和连杆9,低副数为5个,即图2b中构件l、2、3(或4)、5。即A、曰、c、D和,点。由于此时撞块6和螺栓8已脱离接触,而连杆9的运动趋势是顺时针转动,故螺栓10对它失去约束作用,所以此时只剩G点一个高副,机构的自由度数仍为:
所以,当轴1继续向右移动而推动连杆3顺时针转动时,由于连杆3、托架5、连杆9及机架构成一个平行四连杆机构,故托瓦沿一斜线后移,直到移至床身内的预定位置。
当溜板箱移过托架位置后,控制板7向相反的方向推动滚子2,而在弹簧1l的作用下也使轴1向左移动,与此同时,连杆4与托架5仍靠在一起,机构的自由度仍为l。所以,轴1带动连杆3逆时针转动,并通过托架5带动连杆9逆时针转动,使托瓦移出床身。当托瓦移至两杠下方后,连杆9与螺栓10接触,使连杆9不能继续转动,连杆3在轴1的带动下继续逆时针转动,使连杆4和托架5顺时针转动,托瓦抬起并重新托住两杠。这样就完成了一个动作循环。
4.结语
车床丝光杠机动托架,经过我公司多年实践验证,自动控制性能稳定,无冲击,无振动,系统刚性强,加工零件精度高,质量好,为操作者解脱了繁重的劳动,生产效率高。
投稿箱:
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com

