


基于Ether CAT总线的高速高精度多轴伺服运动控制器
2017-11-30 来源:广东工业大学自动化学院 作者: 栾 伟 易勇帆 王钦若
【摘要】提出一种基于Ether CAT总线多轴伺服运动控制器。该运动控制器以STM32F427ZET6为核心完成数据通信、路径规划及数据处理;采用MCX314完成伺服电机高速高精度的运动控制。该控制器还通过STM32实现了ET1200从站接口、485接口、232接口、AD采样接口及SPI总线扩展接口等。该控制器具有很强的适用性,既可以用在高速数控冲床上又可以用在激光切割机中以及其他需要高速高精度定位的数控设备上。
【关键词】Ether CAT;STM32;高速高精度;运动控制器;数控系统
1 、引言
现代数控系统要求高速高精度定位、较强的适用性和操作便捷性。当前市场上主要的运动控制器有嵌入式控制器和基于PC的控制器。嵌入式器由于运算能力和存储容量有限,造成升级、扩展困难。本文提出一种上位机为PC机,实时运动控制器为STM32和MCX314的控制系统架构。将CAD文件的导入,G代码解释,加工路径生成等放在上位机上完成;生成好的指令再通过Ether CAT实时以太网发送到运动控制器上执行。控制系统具有人机交互性能好、上位机软件扩展性强、应用场合广、控制器定位速度精度高等优点。
2 、控制系统架构设计
目前高端市场主要以基于PC的系统为主。基于PC的控制系统又分为两大类:使用高速现场总线(如Ether CAT或Power-Link)和“PC+运动控制卡”的运动控制系统。使用高速现场总线的控制器,总线协议开放,通用性强,通讯速率高,发展前景广。而PC+运动控制卡式的运动控制系统需要将运动控制卡插入计算机主板,通用的工业PC机软硬件不可裁剪,无法降低成本和适应特定场合。工业PC机采用非实时的Windows系统,无法满足加工需求;PC机容易死机,无法满足工业现场的要求。在这种情况下,充分利用PC机作为上位机的易操作性和ARM芯片作为下位机控制芯片的可靠性来设计本控制系统的架构。通过运行在工控机上的上位机软件,上位机运行基于PC的QT图形操作系统,可以设置运动控制参数、实时显示加工进度、系统的运行状态。上位机将导入的CAD图纸读取后,转化成要加工的点位信息(G代码);G代码通过Ether CAT总线发送给控制器,控制器收到加工的点位信息后,发送脉冲/方向控制信号给伺服驱动器(SC)控制电机(SM)走相应的规划轨迹。
32路的I/O将采集的开关信号(如限位,安全防护,紧急停车等)发送给控制器,起到安全保护的作用。
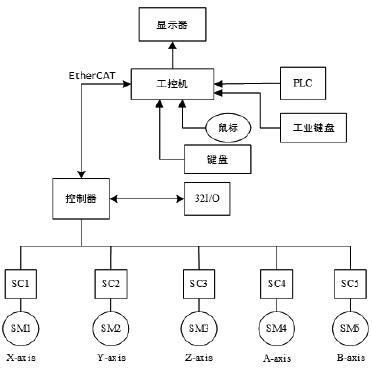
图1 控制系统架构设计图
3 、控制器架构设计
控制器架构由主板和接口板组成,主板上主要有STM32F427作为主控芯片,MCX314和MCX501作为专用的运动控制芯片;主控芯片与专用运动控制芯片之间通过FSMC总线连接,对其读写命令和数据。主控板和接口板通过接插件进行连接。接口板上主要分布ET1200从站通讯模块电路,电源转换模块电路,信号隔离模块电路(高速磁耦隔离和低速光耦隔离),AD7606采样模块电路,232/485通讯模块电路等。
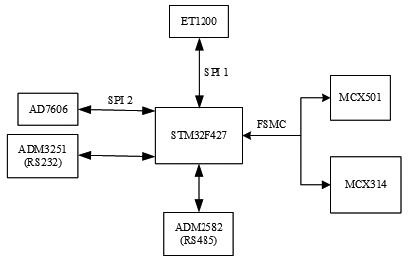
图2 控制器架构设计图
4、加减速控制算法设计
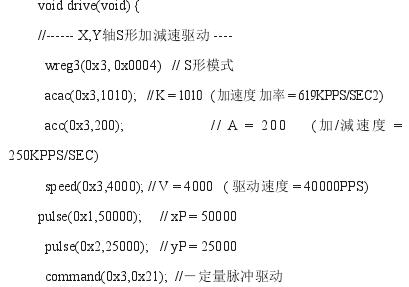
为降低运动控制器在高速点到点之间运动时产生的振动,通过S形加减速算法对伺服电机进行加减速控制,实现高速高精度的点到点定位。专用运动控制芯片MCX314可以便捷地通过配置寄存器参数来生成需要的S形加减速曲线。例如,通过模式设定,将MCX314的WR3寄存器D2~D0位置为0,0,1即可设置为对称S形加减速驱动(范例程序如下);S形加减速驱动参数可设定加速度增加率JK,加速度AC,初速度SV,驱动速度DV,移动脉冲数TP。
5 、 结语
本文设计了一种基于Ether CAT总线的高速高精度多轴伺服运动控制器,该控制器采用Ether CAT总线为通讯方式,使用STM32+MCX314为控制核心:一方面Ether CAT总线具有开放程度高、实时性好,技术成熟;另一方面STM32具有功耗低,性能强,成本低的优点,并且 MCX314大大简化了运动控制系统的软硬件结构和开发工作,所有实时运动控制可交由运动控制芯片来处理。通过S形加减速算法对伺服电机进行加减速控制,解决了高速高精度的点到点之间的定位问题。该控制器已经做出了产品并小批量量产,目前主要配套用在数控冲床运动控制系统上,激光切割机运动控制系统,运行稳定且定位速度精度高。
投稿箱:
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com
更多相关信息

